A körrepülés rövid története
Valószínűleg Amerikából terjedt el a körrepülés. Kezdeti formáiról szűkszavú leírások vannak, több változata létezett. Az egyik ismert, a “round-the-pole flying” (RTP), amelynél egy gumimotoros gép irányítás nélkül repült egy rúd körül. Van még az úgynevezett G-line flying, amelyet Victor Stanzel használt, ez az RTP-hez hasonló, csak robbanómotoros változatban. Egy másik említett forma Oba St. Clair nevéhez fűződik, aki 4 szál huzalt használt az irányításhoz, mely a 30-as években dokumentálva lett. Ez utóbbit meglátva kezdett el tervezgetni Nevilles E. Walker, közismertebb nevén Jim Walker, és a 40-es évek elejére fejlesztette ki a ma is használt 2 huzalos változatot.
Napjainkban alapvetően hat fő ága van:
- Sebességi (Speed – F2A)
- Műrepülő (Stunt/Aerobatic – F2B)
- Túra repülés (Team Racing – F2C) – ennek egy változata az F2F kategória
- Szalagvadászat (Combat – F2D)
- Élethű (makett) modellek (Scale – F4B)
- És legvégül a Navy Carrier, amelyben, a nevéhez hűen, haditengerészeti mozzanatokat mintáznak meg, a pontozásnál felszállást, leszállást, gyors repülést, és lassú repülést értékelnek. Itt a versenyzők szabályozzák a motor fordulatot. Ezek mind több ágra vagy alváltozatra oszthatók. Például a Túra sportágnak körülbelül 8-10 különböző “oldalhajtása” van.
Kanyarodjunk vissza a kezdetekhez: A 40-es évek végén már az oroszok is foglalkoztak a huzalos repüléssel, és a modell kísérleti intézetükben folyamatosan fejlesztették az összes ágát a modellezésnek.
Magyarországon az 50-es években terjedt el azután, hogy 1949-ben két modellező meghívást kapott egy Szovjetunióbeli össz-szövetségi modellező versenyre.
Az ottani minták alapján jött létre a Modell Kísérleti Intézet (Moki), és a körrepülés szép lassan beépült a “köztudatba”.
Az 50-es éveket nevezik az Aranykornak, mivel ekkor fejlődött a legnagyobbat motorikus, mechanikus és aerodinamikai szempontból is. Ráadásul a híres modellek is ekkortájt születtek:
gondoljunk csak a Nobler-re. Nagy tábora volt ennek a sportágnak, mivel sokáig csak a kiváltságosok tudták használni a távirányítós technikát, így a körrepülő versenyeken is sokan indultak régebben. Korabeli fotókon 30 körüli létszámok láthatók az országos versenyeken! Valamilyen okból a szalagvadászat nem terjedt el hazánkban, és a makettezés sem vonzza az építőket. A többi kategóriában viszont nagyon jó eredményeket hoztunk sokáig! Speed-ben világ- és Európa bajnoki helyezéseket hoztunk el, túrarepülőink és műrepülőink sem szégyenkezhettek a nemzetközi mezőnyben.
És ez érvényes a mai napig!
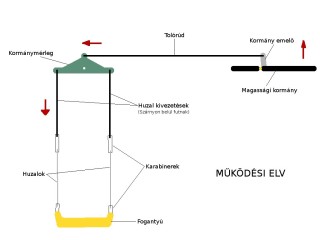
Működési elve
A huzal irányítás miatt a gép körpályán mozog. A folyamat lényegében a marionett bábu mozgatásához hasonló. Van egy fogantyú, melyhez a vezető huzalok csatlakoznak karabinerek segítségével, melyek a gép huzal kivezetéseibe és azok pedig a kormánymérlegbe csatlakoznak (a kivezetésekre azért van szükség mert a szárnyban fut tovább a rendszer) a kormánymérleg (egy tengelyen elhelyezkedve) köríves pályán egyik és másik oldalra billen, ebből eredően a tolórúd előre-hátra csúszkál, mely a magassági kormányhoz csatlakozik. Csak a kereszttengelye körül fordul a gép, ebből adódik, hogy a repülhető figurák a bukfencek, talpon- és háton-repülések kombinációi és változatai. Minden olyasmi, ami egy félgömb felületére „felrajzolható”.
Kezdés
Építés:
Egy körrepülő elkészítéséhez tudni kell, hogy miben különbözik egy R/C masinától. Ezek fontosak, de nem nehezek! Első gépnek a lehető legegyszerűbbet készítsük el, amelyet olcsó és könnyű javítani! Tehát egy laptörzsű gépet kell készítenünk egyszerű szárnnyal, egyszerű bevonattal, és kívül elhelyezkedő kormánymechanikával. Volt, aki egyenesen azt tanácsolta, hogy a szárny ne borda szerkezetes legyen, hanem egyszerű lap szárny egy kis merevítéssel és egy kis egyszerű profillal megfaragva. Így a kormány rendszer teljesen kívülre kerül, és hiba esetén azonnal, és könnyen javítható! A gép legyen minél könnyebb, de ahova kell, azért használjunk nehezebb strapabíróbb anyagokat. Ilyen a motortartó, amely valamilyen kemény fa legyen (bükk, gyertyán, esetleg juhar). A szárnyat fenyő léccel vagy karbonnal merevítsük (a főtartóknál mindenképpen és mondjuk, a belépőnél és kilépőnél). Huzalt 1-2 webshopból tudjuk csak beszerezni. (Pl. http://brodak.com/ ) Másik megoldás, hogy egy versenyzőtől vesszük meg a nem használt huzalját. A futószár rugóacél huzal legyen vagy lehet. Keréknek elegendően nagy átmérőjűt (min. 50 mm) válasszunk. Ez az első próbálkozások miatt szükséges, melyet mindenképp füves területen kezdjünk! Az első motorunk izzógyertyás legyen, ugyanis egy öngyulladásos motor sokkal több gyakorlatot kíván. Gyártanak külön körrepülőhöz valót is, de egy rc modellhez valót is használhatunk. Ezt átalakíthatjuk fix fordulatosra is (karburátor cserével), vagy a gázkart valamilyen módon a maximális fordulati állásnak megfelelően rögzíthetővé kell tennünk. Legalább 2.5ccm-est válasszunk! Ennek megfelelően a szárny fesztávja 80-90cm lesz. A gép hossza ennek arányában 55-65cm, és a vízszintes vezérsík 35-40cm fesztávú lesz (kb 500-700g legyen a max. tömeg). Egy ilyen, megfelelő vastagságú (0,3 mm) huzalon kb. 15 m-es huzalhosszal már biztonságosan repíthető, és így nem lesz túlságosan gyors a pilótához képest. (A sebességet a köridő hosszaként értve)
A repítéshez, pontosabban az irányításhoz egy fogantyút is kell készítenünk. Ez sem bonyolult feladat. Kreatív megoldás lehet például egy padláson porosodó vasaló markolata, mely kényelmes fogást biztosít, és erős is. Már csak a huzal rögzítésének helyét kell kialakítani rajta valamilyen erős és kicsi karabiner segítségével, amit akár mi is elkészíthetünk. A beakasztások helye mindenképpen állítható, vagy változtatható legyen!
Alapvető építési szabályok:
- Könnyű gép legyen, mely gyorsan elkészíthető (ezáltal gyorsan javítható).
- A vízszintes (azaz horizontális) tengelyhez képest a szárny, a vezérsík és a motor 0 fokban van!!!
- A súlypont négyzet alakú szárnynál kb. a belépőéltől nézve a szárny 1/6-ánál legyen.
- Az irányító rendszer tisztán és ellenállás nélkül működjön. Tehát ne szoruljon!!
- Szimmetrikus vagy enyhén emelő szárnyprofil legyen.
- A függőleges vezérsík és a motor a körből kifelé mutatóan kb 2-3 fokos kihúzatást kapjon, ez szükséges a huzal állandó feszessége miatt. Ugyancsak szükséges a belső szárnyvégben levő huzalkivezetést a súlyponthoz képest 3-4°-kal hátrébb vinni.
- Bevonáshoz olyan anyagot használjunk, ami üzemanyagálló. A mai divatos fóliák tökéletesek, használatuk egyszerű, gyors, de a vázat nem szilárdítják, és nem is túl tartósak.
- Az összerakott modellnél arra is ügyeljünk, hogy a légcsavar úgy legyen felrakva, hogy sűrítés előtti állásban vízszintes legyen. Ez leszállásnál fontos, hogy ne akadjon el, és indításhoz is így esik leginkább kézre.
- Körrepüléshez olyan gyertyát alkalmazzunk, ami hideg időben is elviseli a porlasztótű jelentős túlnyitását is (dús keverék) bizonytalankodás, vagy leállás nélkül.
A súlypont kérdése nem olyan kényes, mint távirányítós társainkénál, mivel itt nem baj, ha egy kicsit orrnehéz. Farnehéz semmiképp ne legyen!!!
Első repítés
Eljött a pillanat, hogy a gép rendeltetésének megfelelően a levegőben legyen! Szélcsendes időt válasszunk (nyáron naplemente előtt tökéletes). Mindig legyen nálunk egy jó napszemüveg! Egy ekkora modellhez kb 15m-es huzalpárra lesz szükségünk. A terület ennek megfelelően nagyobb legyen, mint 40x40m!!!
FIGYELMEZTETÉS: lakott területtől távol legyünk, vagy a biztonsági sávot látható módon jelöljük ki!!! Mondjuk egy élénk színű szalaggal egy 40m-es kört bekerítünk! Soha ne repítsünk egyedül. Segítő nélkül, a pilóta nem tudja a felelőtlenül, vigyázatlanul a körbe szaladgálókat repülés közben kiküldeni, így azok közvetlen életveszélybe kerülhetnek.
Egy üres focipálya is tökéletes, de előtte beszéljünk a pályát üzemeltető szervezettel, hogy ne legyen ott senki, és KÉRJÜNK ENGEDÉLYT! Főleg, ha a start helyét kicsit rövidebbre akarjuk nyírni!
Motor bejáratva, csavarok meghúzva, tank teletöltve, huzal felrakva. Ha a segédünk ért a körrepüléshez, akkor teletölthetjük a tankot, mi engedjük el a repülőt, és ő száll fel. Ennek az az előnye, hogy ha szédülünk, akkor vissza tudja venni!! Ellenkező esetben ő engedi el és mi szállunk fel! Ehhez viszont kisebb üzemanyagtartályt készítsünk, mely kb. 2 perc alatt kifogy.
A fogantyút úgy akasszuk a huzalra, hogy az a szál legyen a felső, amely húzásával a magassági kormány az emelést fogja biztosítani, tehát felbillen! Ezt nevezzük húzó szálnak. A felszállás helyét a szélirány szempontjából be kell tájolni. Úgy mondják, hogy „kifújáson” legyen. Ez azt jelenti, hogy ha a gép velünk szemben van lerakva, akkor a szél a hátunk mögül fúj! Egyvalaki fogja a modellt guggolva: a farkánál bal kézzel villa fogással, és a szárnyat jobb kézzel a belépő élnél. Másik személy (vagy a pilóta maga) indítja a motort, és beállítja a fordulatot (a maximum alatt, dúsabb állásban legyen), így a huzal feszessége biztosan jó lesz repülésnél! Ezután a pilóta bemegy középre, a fogantyút kézbe veszi (mint említettem a húzószál felül legyen), leellenőrzi a húzást, tehát ha felfelé billentjük a csuklónkat, akkor a magassági is felfelé billen. Szabad kezünkkel jelezzük az elengedést egy kifele mutató mozdulattal.
Elengedés pillanata: gépet úgy tartjuk, hogy a kerekei és a hátsó csúszka is a földön legyen, továbbá a gép orra egy kicsit kifele nézzen, ezután mindkét kezünkkel egyszerre engedjük el.
Ahogy ellendül a gép egy kicsit a karunkat felfele emeljük lassan (ezáltal a magassági kormány is enyhe emelő helyzetbe mozdul), így a gép szépen a levegőbe emelkedik. A karunkat a vízszintes felett egy kicsivel megállítjuk és a gép (ha precízen van építve) magától beáll egyenesbe! HURRÁ REPÜLÜNK!! Semmiképp ne akarjuk irányítani eleinte! Csak egyenes karral kb 2-3 m-es magasságban körözzünk először! Csak a gépre koncentráljunk, így kevésbé szédülünk! Ne ijedjünk meg ha a gép egy kicsit le-fel mozog (enyhe szél esetén akár plusz-mínusz 60-70cm-es kitérések is lehetnek), a karunkat ne engedjük lejjebb és a fogantyút tartsuk egyenesen!! Túlságosan fel se menjünk, tehát a karunkat ne húzzuk fel 30-40 fokos szögben, mert ott a gép is szűkebb köröket repül, így gyorsabb lesz, jobban szédülünk.
Leszállás:
Ez esetben meg kell várni, míg kifogy az üzemanyag, és álló motorral kell letennünk a gépet. A légcsavar a menetszél miatt beáll vízszintesbe, és így várhatóan nem fog eltörni! Amint megáll a motor, a gépet és a karunkat egyenesen tartva olyan mozdulattal közeledünk a föld felé, mintha mi akarnánk pörgetni tovább a levegőben (tehát vontatjuk a gépet, ehhez egy kis elképzelt körön tolató mozgást is végezhetünk). Az utolsó pillanatban egy nagyon pici magasságit húzunk (kb 20cm magasságban), de éppen csak egy hajszálnyit, különben nagyot ugrik a gép és belefúródik a földbe. És hagyjuk, hogy leszálljon a gép. Gratulálok az első földet éréshez! Ha törik (előfordul), akkor irány a műhely: javítás, és vissza repíteni! Vagy legyen nálunk alapvető javító bázis, és sok légcsavar!! Ezt a folyamatot addig csináljuk, míg a teljes 6-7percet végig tudjuk repülni szédülés nélkül, és a leszállás és felszállás is tökéletes! E nélkül nem lépünk tovább.
Törés esetén:
Szemrevételezés után gyorsan el tudjuk dönteni, hogy elég-e a légcsavar csere.
A motort, ha kemény földet érés volt, és csupa kosz, NE FORGASSUK, mert az esetleges belekerülő föld szemcsék gonosz munkát tudnak végezni! Egyszerűen leszereljük, szétszedjük, kimossuk.
A folytatáshoz mit is ajánlhatnék? Mire idáig eljut az ember, addigra már úgyis tudja, hogy a körrepülés mely ágával/ágaival szimpatizál a legjobban. Videók, szabályok, fotók hozzáférhetők a neten Lehet újítani, kísérletezni, tervezni, építeni kedvtelésből vagy verseny-szerűen. De híres gépek kit-jei vagy tervrajzai is megvásárolhatók innen-onnan.
A használt motor típusok
METANOLOS / IZZÓGYERTYÁS – 2 ÜTEMŰ:
-A leggyakrabban használt motor típus! F2A, F2B, F4B, Carrier és az általános Sportgépekhez mind ezt használják főleg. Miért? Számos előnye miatt. Legfőbb és egyben a legfontosabb a tömeg-teljesítmény aránya, mely a legjobb hasonszőrű társaihoz képest. Továbbá egyszerű kezelése miatt. A műrepülők még egy nagyon összetett előnyét élvezik e típusnak. Ha a különböző nyitási és zárási szögeket optimálisra állítják (természetesen egy jó körrepülő motornál ezt nem kell), az átömlés pillanatát és a kipufogó nyílásának méretét is összehangolják ezekkel, akkor egy intelligens motort kaphatunk. Egyrészt a túrát (fordulatszámát) a gép helyzete szerint váltogatja, de tökéletes eredménynél egyik pillanatban úgy viselkedik, mint egy négyütemű, másikban pedig átvált kétüteműre és leadja a legnagyobb teljesítményét! Ezt 4-2-4-es üzemnek nevezik. Ez a fogyasztást is csökkenti! Ehhez természetesen hozzáértés és folyamatos kísérletezés szükséges.
-Üzemanyaga: 80% Metanol (Metilalkohol) + 20% Kenőolaj (leggyakrabban első sajtolású Ricinus) – teljesítmény növeléshez és egyenletesebb járáshoz Nitro-metánt szoktak keverni hozzá, 5% elegendő a Metanol helyett.
METANOLOS / IZZÓGYERTYÁS – 4 ÜTEMŰ:
-Kedvelt motor, mivel csendesebb. Nyomatéka nagy, így a méretéhez képest nagyobb légcsavart is rakhatunk rá. Fordulatszáma a szerkezete miatt állandó. Ez sokaknak, akik az intelligens 2-üteműhöz szoktak, nem kedvelt, mivel műrepülés esetén a manőverek lefelé szálló ágában nagyon begyorsítja a gépet. Főleg a Scale kategóriában használják, mivel hangja közelebb áll az igazi motorok hangzásához. Kicsit talán nehezebb indítani előző társánál. Sajnos egy hátránya még van, a nagyobb tömege. A súlypontra így nagyon oda kell figyelni, gondos tervezést igényel a gép.
-Üzemanyaga: 80% Metanol (Metilalkohol) – 20% Kenőolaj (+ igény szerint Nitro-metán)
ÖNGYULLADÁSOS / DIESEL (ÉTERES):
-Az F2C kategóriában még mindig ezt használják, mivel a verseny közbeni leszállásoknál gyorsabban túl lehet lenni az utántöltési és indítási folyamaton. Fogyasztása nagyságrendekkel kedvezőbb azonos méretű metiles társainál. Nyomtéka ennek a motortípusnak is igen jó. Egy hátránya, hogy étert és Amyl-Nitrit-et nehéz szerezni a működtetéséhez.
-Üzemanyaga: 50% Kerozin (vagy Petróleum) – 30% Éter – 20% Ricinus – (1-2% Amyl-Nitrit) – utóbbi az indítást könnyebbé teszi.
ELEKTROMOS:
-E technika rendkívül sokat fejlődött az utóbbi évtizedekben, egyre olcsóbb és hatékonyabb lett. A kezdetekben oly nehéz, bár manapság számos előnye miatt még mindig használt nehezebb Ni-Cd, és Ni-Mh akkumulátorokat leváltották a Lítium-Polimer telepek. A háromfázisú motorok és hozzá gyártott szinte intelligens vezérlők és szabályzók pontos timer-ekkel kiegészítve méltó ellenfelei egy belsőégésű motornak az F2B kategóriában. A 2011-es EB-n Igor Burger ilyennel nyert, természetesen saját kezűleg tervezett és épített hozzá vezérlőt, mely lemodellezi a 2-ütemű motor intelligens viselkedését.
Itt azonban sokakban felmerült a szabályváltoztatás szükségessége. Mert bizonyos pontokhoz biztosabban hozzájuttatják a versenyzőket.
Az is előfordul, hogy egy idő múlva szétválik ez a kategória “robbanósra” és “villanyosra”.
PULZÁLÓ HAJTÓMŰ:
-A második világháborúból, a V1-es rakéták miatt ismerhetjük ezt a meghajtást. Ez egy nagyon érdekes technika, bár kissé nehéz beindítani egy ilyen szerkezetet. Sajnos nagyon hangos, kilométerekről hallható a hangja. Elavultsága miatt már nem használják, csak a műkedvelők veszik elő néha-néha. Beceneve: Duda.
GÁZTURBINA:
-“AZ” a bizonyos Drága sport! Bizony egy ilyen hajtóművet kevesen engedhetnek meg maguknak. Bár pont az utóbbi egy-két évtizedben fejlődött a legtöbbet a modellezés terén. A scale modelleknél használják főleg, de körrepülésben igen ritka még (pedig a szabályok nem tiltják a műrepülésben sem). Egy-egy használt példányhoz viszonylag kedvező áron is hozzájuthatunk manapság. Érdekes eredménye lenne ha a körrepülésben ezt a témát tovább gondolná valaki… Az biztos, hogy az én fantáziámat megmozgatja!
Robbanó motor esetében mindig fix fordulatosat használnak, amelyet külön e célból, a körrepülőkhöz gyártanak.
Mai gyártók, akik ezt megteszik:
- OS
- ENYA
- MVVS
- SAITO (csak 4-üteműt gyárt)
- SUPER TIGRE
- PROFI (speed, tr motorok)
- DISCOVERY
- BRODAK (a 6.5ccm-s csak 190g!!)
Régebbiek:
Huzal
A huzal, mint említettem, elég kényes kérdés a beszerezhetőség szempontjából. Ha már sikerült megvennünk, akkor itt az ideje alkalmassá tenni a repítéshez! A két szálnak mindkét végére egy olyan kiképzést kell csinálnunk, amelyet be tudunk majd akasztani a gépünk és a fogantyúnk karabinereibe. Két változatot ismerek.
1. Csőszegecs segítségével. (Az internetről rendelt csomagban mellékelni szokták a megfelelő mennyiséget) Az gyakorlatilag olyan, mint a cipőfűző-lyuk a cipőn. Ezen – kis ráhagyással – körbevezetjük a huzalt, körbe bandázsoljuk egészen a szegecsig nagyon vékony kötöző dróttal, itt még mindig hagyjunk ráhagyást, amit visszafordítunk a szegecs felé, azt is körbe bandázsoljuk, és az egészet lekenjük gyorsan száradó epoxival.
2. Veszünk egy 0.8mm-es acél huzalt. Egy 4mm-es rúdra tekerünk belőle két menetet, és a két végét párhuzamosan kihajtjuk, az egyiket kb. 1.5cm-esre a másikat kb. 3cm-esre hagyva. Az egészet körbe bandázsoljuk vékony kötöződróttal. Ezt is epoxival lekenjük.
A huzalunk hossza és vastagsága a repülőnk méretétől függ! Kis motorral rendelkezőknek (1.5-2.5ccm) 15m hosszú és 0.3mm vastag legyen. A közepeseknek (2.5-4ccm) 15-18m és 0.38mm. A nagyokhoz pedig 18-21m (ez a maximum) és 0.38 vagy 1800g felett 0.45mm vastagságot használjunk. Fő a biztonság!
 Follow
Follow




























 ), egyéb formájú szárny esetén a következő a fesztáv négyzetét osszuk a szárny területével:
), egyéb formájú szárny esetén a következő a fesztáv négyzetét osszuk a szárny területével:

![\[C_i_n_d=\frac{c_y^{2}}{\pi\cdot AR}(1+\delta ) = 0,318 \frac{c_y^{2}}{AR}(1+\delta);\]](http://rchangar.hu/wp-content/ql-cache/quicklatex.com-2008eefbd7a01db297502e9572d13d69_l3.png "Rendered by QuickLaTeX.com")







 állásszögek mellett. Az állásszög sajnos nem mindenhol jelenti ugyanazt. Leggyakrabban a légáramlás irányvonala és a profil húrja által bezárt szöget értik, néha azonban a húr helyett az alsó alátámasztó vonalat veszik figyelembe. Ezért mindig tisztázni kell, mielőtt belefogunk a számolásokba, még ha az eltérés nem is olyan nagy.
állásszögek mellett. Az állásszög sajnos nem mindenhol jelenti ugyanazt. Leggyakrabban a légáramlás irányvonala és a profil húrja által bezárt szöget értik, néha azonban a húr helyett az alsó alátámasztó vonalat veszik figyelembe. Ezért mindig tisztázni kell, mielőtt belefogunk a számolásokba, még ha az eltérés nem is olyan nagy.


 =14,4·10-6 m2/s (15°C, 1013,2 mbar). Ezt követően a számot a test hossza (húr hossz) és áramlási sebesség (repülési sebesség) ismeretében könnyedén meghatározható. Belátható, hogy a modellrepülőgépek szempontjából a Re szám tartománya körülbelül 50 000 és 700 000 érték közé esik.
=14,4·10-6 m2/s (15°C, 1013,2 mbar). Ezt követően a számot a test hossza (húr hossz) és áramlási sebesség (repülési sebesség) ismeretében könnyedén meghatározható. Belátható, hogy a modellrepülőgépek szempontjából a Re szám tartománya körülbelül 50 000 és 700 000 érték közé esik.![\[ Re=\frac {lv\rho}{\mu}=\frac{lv}{\frac{\mu}{\rho}}=\frac{lv}{\nu}\approx 6,94\times 10^{4} lv\]](http://rchangar.hu/wp-content/ql-cache/quicklatex.com-ab3153fd63f070d1bdc0b434c45ac657_l3.png "Rendered by QuickLaTeX.com")
 – a közeg (levegő) sűrűsége (kg/m³);
– a közeg (levegő) sűrűsége (kg/m³);  – az anyagra jellemző dinamikus viszkozitás (Pa·s),
– az anyagra jellemző dinamikus viszkozitás (Pa·s),  – a húr hossza (m),
– a húr hossza (m),  – az áramlás sebessége (m/s).
– az áramlás sebessége (m/s).






 . Egy másik minőségi mutató a
. Egy másik minőségi mutató a  siklószög, mely a légerő eredőjének visszahajlási szögét mutatja qz áramlás normáljához (merőlegeséhez) képest:
siklószög, mely a légerő eredőjének visszahajlási szögét mutatja qz áramlás normáljához (merőlegeséhez) képest:  .
.





















