És végre itt a várva várt pillanat (na, nem a távirányító számára)! Felfegyverkezve csavarhúzóval, forrasztópákával, új tudással, egy kis türelemmel, meg csipetnyi szabadidővel elkezdjük a beavatkozást (ha eddig még nem forrasztottál smd-t nyákra, talán nem a legjobb pillanat elkezdeni, de ezt mindenki döntse el maga). Akkumulátor maradhat, hat csavar ki, fedlap leszed, 12-tűs csatlakozó dugó gondosan kihúz az alapi foglalatból, és elérhetővé vált a távirányító szíve, pontosabban agya minden létfontosságú szervvel. Na nem kell azonnal kiszedni, meg lobotómiát végezni rajta, csak egy kis bájpassz kerül bele. Ha már egyszer felnyitottuk a gép burkát, akkor több problémát is próbáljunk meg orvosolni.
MODE1-töl a MODE2-ig
Gyakran találkozhatunk a fórumokon azzal a kérdéssel, hogy miben tér el a Mode1 és a Mode2 kialakítású távirányító? A Mode1 olcsóbb, tényleg jobb a Mode2-nél? Lényegében semmivel sem jobb, vagyis alkatrész mennyiségében nem térnek el. A felépítés szimmetriájából adódóan csak pár apró alkatrész került át az egyik oldalról a másikra. Ezek általában kapcsolók, feszítő rugók, fékező lap meg pár csavar. Ezen alkatrészek 15 perc alatt a megfelelő oldalra könnyedén átrámolhatóak. Kell hozzá egy kis csavarhúzó, egy csipesz, meg egy csipetnyi türelem. A lépésekről majd a képek mesélnek:
A bal bot függőleges középre-húzó kar rögzítő tűjét húzzuk ki, akasszuk le a visszahúzó rugót. A jobboldali bot féklemezét tegyük át bal bot mechanikájára és állítsuk be a kívánt feszességet csavarok meghúzásával. Jobboldali botnál tegyük helyére a visszahúzó kar rögzítő tűjét, és akasszuk be a rugót a műanyag fülbe. A kar egyik végét tegyük a rugó fülébe, nyomjuk le a kart és szintbe hozva a rögzítő tűvel, toljuk bele a tűt. Ezután már csak a rugók feszességének beállítása maradt hátra.
Szimulátor PPM jel normalizálása
Ha V.2 távirányítónk van, akkor első lépésként érdemes szimulátorozással kapcsolatos javítást elvégezni. A probléma ugyanis az, hogy ha a frekvencia modult nem lehet levenni, akkor általában a helyén marad és szimulátor használata során sugároz – a szimulátor kábel nem von el annyi energiát, hogy az RF modul ne tudjon inicializálni. Ezért egy kis ellenállással megbolondítva az áramkört el lehet érni a megfelelő feszültségesést. Ehhez megkeressük a megfelelő pályát a frontális burokra (előlapra) rögzített nyáklapon (balról 6. tű a tűsoron) és vékonyan elvágjuk a réz vezető pályát (nem kell gödröt vájni). Egy kis felületen eltávolítjuk a lakkot, hogy forrasztható legyen. Ezután vagy SMD, vagy furat szerelt 1 kOhm nagyságú ellenállást forrasztunk a szakadás áthidalására. Személy szerint az SMD megoldás közelebb áll hozzám, mert tisztább, szebb eredményt ad.
Fordított polaritás elleni védelem
És megint valaki fordítva dugta rá a rádióra az akkumulátor, és megint elektromos meghibásodás füstje terjeng a levegőben. Aki megtette, tudja, hogy a 2 másodperc hosszú idő. Sajnos, ezt a számos modellezőnek bosszúságot okozó problémát még mindig nem orvosolták a gyártók. A csatlakozó olyan formájú, amely ugyan előfordul az akkumulátorok világában, de általában a 7,4V LiPo akkumulátorok balanszer végen. És ha azt rádugjuk, azonnal kapunk egy rövidzárlatot, mert a rádió lábkiosztás: [— + —]. Ha pedig JST csatlakozót használunk, könnyű mellényúlni. Az elsődleges megoldás tehát: FIGYELJETEK ODA A POLARITÁSRA!
De ha van egy kis időtök, egy kis műszaki érzéketek, egy forrasztó páka meg egy multiméter, akkor ‘bolondbiztossá’ tehető a készülék. Az első módszer az az aszimmetrikus csatlakozó alkalmazása, mely csak egy bizonyos tájolásban dugható össze. Ez lehet akár egy JST vagy egy fülezett szervó csatlakozó páros.
És ha már megtörtént a baj és az áram az ellenkező irányba megindult. Akkor készüljünk fel arra, hogy akár NÉGY darab feszültségszabályzót és pár elektrolitikus kondenzátort is gajra vágtunk. Nem nagy tétel, de méricskélni, forrasztani kell. Előfordul, hogy akkora áram indul meg visszafelé, hogy felperzseli a nyák áramellátó pályáit.
Legelső alkatrész, mely valószínűleg elfüstöl ilyenkor, az egy tantál elektrolitikus kondenzátor (sárga vagy fekete pici kocka fehér csíkkal). Általában ez egy 226C vagyis 22uF 16V értékű alkatrész. Tartalék miatt használjunk azonos kapacitású de 25V feszültségre szánt alkatrészt ha rádiónk táplálására 3S vagyis 11.1V LiPo akkumulátort használunk.
Firmware frissítés – elmélet
Aki elérte ezt az oldalt, az már titkon, néha még saját magától is rejtegetve, pátyolgatja a gondolatot, hogy egyszer azért belenyúl abba a fránya távirányítóba, hiszen annyi lehetőség rejlik benne. Sok magánfejlesztésnek köszönhetően új firmware-eket próbálhatunk ki a távirányítónkban, és eldönthetjük, melyik vala kényelmesebb, hasznosabb számunkra. Mivel a fejlesztések többsége open source licenc alatt fut, mi magunk is tehetünk hozzá, vagy éppen elvehetünk belőle, de ehhez kicsit többet kell tudni az eszközökről és a projektekről. Egyes firmware-ek hardver módosítást is igényelnek.
A FlySky 9x távirányító (bár több brand alatt is fut) kemény külseje alatt egy igen szorgalmas és szeretni való kis 8 bites mikroszámítógép ügyködik: egy Atmel ATmega64A. Dicsérhetném oldalakon át, hogy mennyire nagyszerű és strapabíró találmány, de ezt a kis könyvében úgyis jobban leírták az alkotói. Áldott tulajdonsága az önmagát írni való képessége, ráadásul ezt az áramkörbe beültetve is el tudja végezni (ISP). Majdnem elpusztíthatatlan és olcsó – ezen tulajdonságok teszik tökéletes alannyá a kreatív elmével megáldott modellezők számára.
Ahhoz, hogy a firmware-t a mikrokontrollerbe töltsük, össze kell kötnünk egy számítógéppel (ez lehet PC, Mac, vagy egy programozó eszköz). Ehhez 6 lábat kell megkeresnünk a mikrokontrolleren (zárójelben az ATmega64A kivezetés számai): SCK (11), MOSI (12 vagy 3 [Tx]), MISO (13 vagy 2 [Rx]), RESET (20), GND (63), VCC (64). Hogy a feszültséget és az időzítéseket megfelelő szinten tudjuk tartani, egy programozót is közbe lehe iktatni. Ilyenkor a számítógép valamilyen módon átadja a firmware bináris kódját a programozó eszköznek, és az gondosan ügyelve a megfelelő feszültségekre az időzítésekre adagolja a mikrokontrollernek. Munkánkhoz lényegében bármelyik AVR programozó eszköz megfelel, mely ismeri az ATmega64a mikrokontroller speciális igényeit, de ha ajánlhatom, legyen AVRdude kompatibilis. Sok AVR-piszkáló program ezt a kis parancssoros programot használja a háttérben és szintén open source:), – futtatható mind Windows mind Linux környezetben, támogatja a COM, az LPT és az USB portokra kötött programozó eszközök hadát, ráadásul, a támogatása is jó.
Talán a legegyszerűbb programozók a soros és párhuzamos portra köthető egységek: nem igényelnek speciális drivert, de oda kell figyelni a lábkiosztásra, és megbosszulhatják, ha hibázunk. USB ISP-k ugyan igényelnek drivert, de elláthatják árammal a programozandó eszközt.
— párhuzamos port. Ha biztos a kezünk, elég lesz pár 220 Ohmos ellenállás. Ha rákeresünk a témára, ezerszámra jönnek a találatok. Egy példát én is bemásolok, de könnyű kiereszteni a portból a füstöt, ezért más megoldást javaslok.
— soros portra köthető egység elkészítése sem igényel atomfizikusi diplomát. Részletes leírását a diy4fun oldalán találtam. Az eszköznek összköltsége nagyjából egy gombóc fagyi árával mérhető, és egy órányi munkánkba kerül. Ha sikerült összerakni, kell hozzá egy soros port a PC-n, vagy egy USB-RS-232 átalakító, egy program, – mondjuk PonyProgvagy AVRdude és hozzá AVRdude GUI. A program menüjében válasszuk ki a megfelelő eszközt: SI Prog API vagy ponyser és akkor már flesselhetünk is.
— USB port.AVR Pocket Programmer (driver), USBTinyISP, mySmartUSB light és a modellezők körében igen népszerű: USBasp. Ráadásul nevetségesen olcsó. Végiggondoltam, hogy mennyi idő kell egy egyszerű programozó összerakásához, és végül rendeltem egy USBasp-t. Érdemes ezenkívül még megtekinteni még a WinAVR illetve az AVR Burn-O-MAT programokat. Hasznos társaink lehetnek a jövőben.
A következő módosításokat mindenki a saját felelősségére végezze, semmilyen garanciát nem vállalunk a módosításokért!
A távirányítóban elvégzett módosítások garanciavesztéssel járnak!
Aki átlép ezen a küszöbön, magára vessen :). Innen nincs visszaút, mert minek is mennénk vissza a sötét középkorba.
A programozó bekötéséhez célszerű csatlakozóra kivezetni a szükséges lábakat, és azt egy biztonságos helyen beépíteni a távirányító dobozába. Ehhez megkeressük az ISP-hez szükséges vezetékeket. A távirányító alaplapján, a mikrokontrollertől balra (felirata alapján), közelebb a távirányító talpához találunk ezüst pöttyöket: teszt vagy programozó padok (FlySky V.1.x alaplapján sajnos nem jó helyre kerül az egyik potty, így le kell majd kaparni a lakkot az egyik pálya kis szakaszán). Ezen lakkmentes területekre forrasszuk a vezetékeket, és egy csatlakozóba összefogva őket kivezetjük. Mivel a mikrokontroller két kommunikációs porttal is rendelkezik, így egyes esetekben lehetnek eltérések a bekötésben, de a következő az általános:
Ezzel a készülékünk készen áll a szoftver frissítésre. De még mielőtt a firmware bugyraiba belevetnénk magunkat, és a távirányító is a boncasztalon van, nézzük meg, mit tehetünk még a távirányítónk jobbá tételéért.
Számomra a távirányító legvonzóbb része a szoftver, és annak folyamatos szabad fejlesztése. Sokan készítenek videókat, írnak cikkeket a készülék használatáról, megoldásokról és trükkökről. A párhuzamos fejlesztések megtették a jótékony hatásukat és mára egy tucatnyi új firmware (elektronikai eszközt vezérlő mikroprogram) létezik, ráadásul ezeket mi magunk is módosíthatjuk, beírhatjuk az eszközbe. Ezzel a távirányítónk új tulajdonságokra, tudásra tesz szert, ezzel válik jobbá, kényelmesebbé, hasznosabbá számunkra (módosított menü, új mixek, telemetria, PPM csatornaszám, moduláció iránya, frame/keret hossz stb.). A kreatív modellezők nem csak firmware-t, hanem a hardver részét is átépítették. Egy ilyen alaplap sajnos többe kerül, mint egy komplett rádiószett. De nézzük előbb, mi rejtőzik a műanyag bőr alatt.
A készülék lelke egy Atmel ATmega64A 8 bites mikrokontroller, mely rendszeres időközönként leolvassa a potméterek (3+4), kapcsolók (7), trimerek (4) és gombok(6) állapotát/helyzetét, kiértékeli a mixfüggvényeket, előállítja a PPM jelet és kezeli a 128 x 64 pixeles molochrom LCD kijelzőt. A következő ábra a működési elvet mutatja be (távirányító beállítása nélkül):
A rendszer kétféle bemenetet fogad: 1. analóg – potméterek, botkormányok – alapvetően feszültségváltozást idézünk elő mozgatásukkal, amit az analóg-digitális konverter egy bináris számmá átalakít (-512 és 511 érték között). Mivel minden potméter egy kicsit más, ezért a végállások meghatározásához kalibráció elvégzése szükséges (pl. szoftverfrissítés után). 2. digitális – kapcsolók, gombok – bináris értékű adatot szolgáltatnak: (On-Off, a háromállású kapcsoló két kapcsoló egyesítésével hozták létre).
Kezdjük talán a legfontosabbakkal (rajzok, jelölések MODE2-re értendőek).
— potméterek:
AIL – csűrő
ELE – magasságkormány
THR – gázkar
RUD – oldalkormány
P1 – potméter – Hov.Pit
P2 – potméter – Hov.Thr
P3 – potméter – Pit.Trim, AUX2
(a nyolcadik ADC port a feszültség mérését végzi)
Ezen analóg bemenetek digitalizálás után átesnek egy normalizáláson, amely a kalibrációs adatok alapján a kapott értékeket a megfelelő számtartományba helyezi. A botok adatait ezután még egy Dual Rate és Expo szűrő tovább igazítja.
Dual Rate (D/R) – gyakran kettős kitérítőnek nevezik, bár szerintem, nem adja át azt, amire használják. Lényegében a szervók maximális kitéréseinek korlátozására szolgál. Lassú repülésnél lehet 100%, ha nagy sebességgel haladunk, akkor a 60% is elegendő a manőverek végrehajtásához. (egy szorzóról van szó, melyet a függvényparamétereknél használjuk) Expo – alapvetően a szervók lineárisan követik a irányító botok mozgását. Ennél kényelmesebb és precízebb irányítás nyújt az exponenciális követés: a közép vagy minimum állapot körnékén kevésbé érzékeny, kisebb kitérést, finomabb mozgást tesz lehetővé, míg a végálláshoz közelítve egyre erőteljesebb reakciót vált ki.
— kapcsolók, gombok:
T.Cut – motor leállító
Rud.D/R – oldalkormány kitérési tartomány váltó
Ele.D/R – magassági kormány kitérési tartomány váltó
F.Mode – (AUX 3), 3-állású repülési mód választó kapcsoló (ID0 – a felső, ID1 – középső, ID2 – az alsó pozíció)
Ail.D/R – csűrőkormány kitérési tartomány váltó
Gear– futómű kapcsoló
TRN – oktató kapcsoló (rugós visszatérítésű)
Trimerek – 2-2 gombkapcsolóval ellátott csúszkák, melyek segítségével ofszet hozzáadást végzünk, vagyis elmozdítjuk valamely irányba a karok középértékét. Gázkar esetében a minimális érték körüli eltolást végezzük a trimmelő kar segítségével. A szélső kar kitérésekhez közelítve a trim hatása csökken és maximális kitérésnél egyenlő a nullával (-31 – 32, de elérhető az 512 is 4-foku polinóm segítségével).
SW1 .. 6-os – Speciális szoftveres kapcsolók, melyek segítségével kijelző képét, távirányító és modellünk beállításait elérjük el, változtatjuk (ezekről és még sok-minden másról bővebben a er9x projekt magyar leírásában olvasható).
Adatok feldolgozásának folyamata a FlySky távirányítóban.
Mixer – függvényék, paraméterek, változók rendezett halmaza, – ez a mag, mely összeköti a szoftver egyes moduljait, meghatározza a kimenő adatok értékeit (akár 16 csatorna is lehet!) a bemenő adatok függvényében, elvégzi a bemenő adatok súlyozott kiértékelését, figyel az időzítésekre. Curve-válaszgörbék, melyek a bemenő és a kimenőjelek közti összefüggést írják le. Áldott tulajdonságuk, hogy csak az összefüggést írják le. Az forrás és a kimenet hozzárendelkezik a mixben történik, ezért ugyanaz a függvény több mixben is felhasználható. SoftSwitch – szoftveres gombok, funkcionálisan úgy használhatjuk őket, mintha kapcsolók lennének, de nem fizikai kapcsolóval vannak összekötve, hanem logikai feltételeket tudunk rendelni hozza. Ha a feltétel teljesül, akkor bekapcsoltnak, ha nem teljesül, akkor kikapcsoltnak tekinti a rendszer. SaftySwitch – biztonsági kapcsolók – biztonságos magas prioritású értéket rendelhetünk egy csatornához egy kapcsolón keresztül. Például -125 értéket a 3-s csatornához, miközben állítjuk a többi csatornát, megakadályozva a véletlen elindulást. Limit – (máshol lehet ATV, EPA, AST) a legjobb esetben a szervók úgy vannak mechanikailag összekötve a vezérszervekkel, hogy azok teljes mozgásterükben szabadon, ütközés nélkül, teljesen kitérnek. Ha erre nincs lehetőség, komputeres rádión korlátozni lehet a kibocsátott jel értékét, ezzel korlátozva a szervó mozgását (pl. az kiküldött maximumok -256 – 255 helyett csak -232 – 231, de lehet aszimmetrikus is – ilyen az EPA). Ezt kétfeléképpen lehet megvalósítani: korlátozzuk a kimenő jel nagyságát (ilyenkor egy holttér keletkezik az irányító karok végállásaiban) és függvényparaméterek súlyozása (AFR) – ilyenkor a jelkeverő függvények bonyolultabbak és nagyobb számítási teljesítményt igényelnek.
Lehetne még többet, részletesebben írni a rádió lehetőségeiről, de ez már megtették mások, így nem folyok bele a többoldalas litániákba. Fontos megemlíteni még, hogy egyes firmware verziókban nincsenek fix funkciójú kapcsolók! Bármelyik kapcsoló bármi lehet. Ami már szintek fantasztikum, hogy a távirányítót számítógépes programon keresztül (compagnion9x, ePee) is tudjuk programozni, modellbeállításokat fel/le-tölteni a készülékbe, meg tudjuk osztani másokkal.
Azok számára, kik szívesen belenéznének a belsejébe, csatolom a kapcsolási rajzot is, bár később még boncasztalra kerül a távirányító.
Igazi sikertörténetnek lehetünk szemtanúi. Követve az FlySky\iMax\Turnigy 9x (innentől csak FlySky 9x) távirányító fejlődését, a klónok és az erre a modellre épülő újabb egyéni fejlesztésű rendszerek alakulását. A siker titka talán az Open Source-ban és a hobbi világban egyre nagyobb teret hódító Atmel AVR mikrokontrollerekben keresendő. Talán nem elhanyagolható az sem, hogy a távirányító szett a többihez képest “piszkosul” olcsó. Tény, hogy a külseje inkább egy játékra hasonlít, de be kell vallani, hogy a kis rusnya külső alatt nagy lehetőségek rejlenek.
Pár szó az első kiadáshoz
Ha visszaemlékszem a debütálásra, akkoriban úgy tűnt, ez is csak egy próbálkozás létrehozni egy olcsó, 2,4 GHz feliratú távirányító rendszert, amely egy kis morzsát szeretne csippenteni a távirányítók piacának tortájából. A “vén motorosok” addigra (kb. 2009 tavasza) már bizonyítottak és megbízhatóan igazolták, hogy a jövő frekvenciája a 2,4 GHz. Természetesen nem adták olcsón az újdonságot, de szállingóztak az új modulok, új márkanevek (Corona, Assan) és a panaszok az olcsóbb kínai gyártmányú 2,4. rendszerekre. Ilyen körülmények között jelentek meg az első FlySky 9x dobozai a boltok polcain. Ennél a rádiónál már érezni lehetett, hogy a kínai gyártók komolyan gondolják a 2,4 GHz technológiájú felszerelések beszállítását az RC piacokra.
Már az első kiadású 9x rádió olyan szolgáltatásokat/funkciókat nyújtott, melyek eddig csak a drágább testvérekben voltak jelen. A gyártó szerint elsősorban helikopterekhez lett fejlesztetve, de tartalmazta az ACRO (repülő) és a GLIDER (vitorlázó) előre programozott típusokat is. Ellátták bőven kapcsolókkal és tekerőkkel, de személy szerint hiányolom a csúszkákat az oldalán, melyek segítségével könnyedén trimelhető egy vitorlázó a fogás váltása nélkül. A 128×64 felbontású grafikus LCD kijelző, a repülési mód kiválasztása menüből, a JR 9303-hoz nagyon hasonló intuitív menü, melyet 6 gomb segítségével lehet kezelni. Ezen kívűl az ötpontos görbék, a DSSS rendszer (Direct Sequencing Spread Spectrum – csak egy csatornát használ) – még ha nem is olyan ellenálló a mostoha rádiókörülményeket tekintve, mint a Futaba vagy Spektrum rendszer –, a redundáns vevő egység és kétségtelenül az 50 USD alatti ára kedvelt bevezető és teszt rádióvá tették.
Minőséggel kapcsolatos aggályok sajnos nem voltak alaptalanok. A FlySky 9x-et hirdető díszcsomagok többször is lekerültek a boltok polcairól. Természetesen, hibátlanul működő példányok is voltak nagy számban, ami a kínai ipar minőség-ellenőrzés teljes vagy részleges hiányát mutatja. Az alig olvasható, hiányos angol nyelvű leírás, az áramingadozásra érzékeny vevő egység (Ha valamilyen oknál fogva 2,4V alá csökken a feszültség, a kapcsolat bomlik, és az áramellátás helyreállása után sem épül fel újraindítás nélkül.) valamint a FailSafe hiánya negatív bélyeget nyomtak a termékre.
Megjegyzésként csak annyit, hogy olcsó távirányítóhoz olcsó repülőgépet, és akkor nem ér nagy csalódás. Mindennek megvan a maga helye és ideje.Ez egy olcsó, hasznos és kényelmes távirányító, de egy sugárhajtású gépet nem bíznék rá, már ha lenne olyanom.
9x, második kiadás
Eltelt egy kis idő, történt egy kis ráncfelvarrás, egy kicsivel több tapasztalatot szerzett a fejlesztő csapat, és piacra került a már mindenki által jól ismert távirányító második kiadása; kicsit más, kicsit jobb. Miután minden RC csapból is az folyt, hogy tényleg jó, kíváncsi lettem rá. Így én is tulajdonosa lettem egy ilyen rádiónak, annak ellenére, hogy már pár éve egy Futaba rádió a társam a modellezésben.
Megérkezett a nagy és meglepően könnyű csomag. Első ránézésre a régi ismerős, a FlySky 9x, de az új verzión a régi teleszkópos antenna helyett egy 2,4 GHz-es egységet találtam, amely egy “V2” szórt spektrumú, 2,4 GHz-es modullal van egy vezetékkel összekötve, sajnos fixen. Minden esetre érdekes gondolat egy nem levehető modullal ellátott modulos távirányító piacra dobása. :) Ha egy másik gyártó modulját szeretnénk használni (Corona, FrSky, FlyDream, Assan..), akkor elő kell venni a forrasztópákát, vagy a harapófogót. Mi több, az árván maradó antenna inkább zavarja majd az új modul adását, mint sem segítené – érdemes tehát azt is leszedni. Ezen kívül nem sok minden változott a megjelenésében: masszív ház, JR-jellegű menü, kapcsolók és egyéb vezérszervek megszokott helyen és kifogástalanul működnek, bár én még mindig keménynek érzem a gombokat. A súlypont helyzetével nem sokat foglalkozott a gyártó, annak ellenére, hogy most már könnyebb antennát kapott, és ha a nyakunkba akasztjuk, dőlni fog a távirányító felénk. Továbbra is riaszt a rádió, ha a kapcsolók nincsenek alapállásban bekapcsoláskor. Előkerült a csavarhúzó, belenéztem. A forrasztások még mindig nem az igaziak, bár némileg javult a helyzet. Sok helyen látszik a kézi forrasztás nyoma. És mit látnak szemeim: robbanásszerűen szétfröccsent ón. Na, ezt alaposan ki kell majd tisztítani. Van még a dobozban egy vevőegység és más semmi: se akkumulátor, se töltő, se CD, se használati, se szervók. 60USD-ért ennyi jár. Igazából, nincs is szükség rá, csak legyen internet hozzáférés. Mindent megtalálunk ott, amire szükségünk lehet, sőt!
Az új vevőegység szatellit egység nélkül érkezett. Úgy tűnik az “új” FHSS (Frequency Hopping Spread Spectrum) frekvenciaváltós rendszerre bízzák a kapcsolat sorsát. Remélhetően a gyártó kellően megnövelte az egység érzékenységét és a zavarelhárító képességét. A “V1” vevő érzékenysége, ahogy azt korábbi független mérések kimutatták, 9-10-szer alacsonyabb volt a hasonló márkás vevőkhöz képest, ezért szatellit nélkül használva már 100 méter távolságnál időszakos szakadásokat produkált. Az újonnan érkezett rendszer moduljára ugyan rá van írva, hogy FHSS, de hát ennyi pénzért mire lehet számítani? A vevő kereskedelmi ára 9 USD. Megmaradtak a kételyek, de a mérések mindent elárulnak: A rendszer folyamatosan használja a 16 csatornát és a modul teljesítménye is nagyobb. Nos, ez már biztató! Bár, valószínű, hogy még mindig nem olyan megbízható, mint mondjuk a Futaba, a Hitec vagy a Spektrum, de már fényévekre megelőzte az eredeti “V1” rádiórendszert, vagy akár egyes távirányítókat, melyekért akár kétszer annyit is elkérnek.
A vevő belsejében is történt némi változás: egy egyszerű negyedhullámú drótantennát dipólus antennára cserélték, amely kicsit érzékenyebb az elődjénél. Legnagyobb változást talán a folyamatos csatornaváltás fogja hozni a korábbi fixcsatornás működéshez képest, amit korábbi verziónál használtak. Ez a kombináció már jól bevált a Hitech-nél is. Sajnos továbbra is ugyanaz a nem túl érzékeny chip van a vevőben, és semmilyen előerősítőt nem találunk előtte, ami javítaná a vevő teljesítményét. A kristályt sem ártana egy nagyobb SMT verzióra cserélni, mivel az utóbbi kevésbé érzékeny az ütésre (amivel sajnos számolni kell). A párosítást visszajelző LED nagyon mélyen a vevő belsejében világít, mezei körülmények között meg kell küzdeni, hogy észrevegyük a jelzéseit. Maga a párosítási folyamat egyszerű és gyors, csak megfelelő helyre kell illeszteni a “kulcsot” és megnyomni egy gombot a távirányító modulján. Sajnos, ez a verzió sem ismeri a FailSafe fogalmát (csak PCM moduláció esetén érhető el). Bármennyire is szeretnénk, hogy másképp legyen, ez a távirányító még mindig a kis gépekhez való. De ha illesztenénk hozzá egy jobb frekvenciamodult … .
Android OS megjelenése óta rohamos fejlődésnek lehettünk tanúi. A platform nyitottsága jót tesz a fejlődésnek, és végső soron a végfelhasználóknak. Jobbnál jobb programok jelennek meg a már negyedik verziónál tartó operációs rendszer alá és a hardver is szorosan követi, megpróbálják kielégíteni a felhasználók legmerészebb álmait. Végül én is zsebre vaghattam egyet, de számomra ez nem egy divattermék, inkább úgy tekintek rá, mint egy nagy teljesítményű számoló gépre egy kis extrával.
Be kell azért vallanom, hogy már rég szemeztem a PDA-kal, de drágák voltak, mire megfizethetők lettek, addigra elévült a tudásuk. Megjelentek az okos telefonok. A jobbik fajtája ezeknek sem olcsó darab, na de egyszer-csak megakadt a szemem egy készüléken, mely talán megéri a pénzét, – Amerikában egy normális telefon áráért lehet venni egyéves HTC Incredible készüléket. Na, mondom, meghívom magamhoz vendégségbe, mert a paraméterei igen jól csengenek a fülemben: 130g, Amoled 16M szín, 480 x 800, 3,7 collos kijelző, 8GB háttértár, 32GB SD-kártya, 1GHz processzor, külön grafikus vezérlő és Android OS.
Megérkezett, kicsomagoltam, — egészen jó: egy aprócska karc a kijelzőn, kaszni hibamentes, van hozzá tartalék akkumulátor — hej, mondom, ezzel majd lehet jampeckodni a mezőn. Sajnos, ezzel nem ér véget a históriánk, mert nem SIM-kártyás a kicsike, vagyis GSM hálózatra nem tudom beregisztrálni csak CDMA hálózatokat támogat, és anélkül pedig nem indul (még), és nagyon akarja a mobil hálózatot. Ehhez bizony kicsit fel kell gyűrni az ingem ujjat.
Kis internetezés után találtam pár “gátlástalanító” ötletet. Mivel írták, hogy hülye-biztos, gondoltam, nekem sem okoz majd gondot. Készülék aktiválásának kihagyása (csak EPST.apk -t tartalmazó ROMoknál működik):
1. Kezdeményezünk egy vészhívás: ##778;
2. Üssük be a jelszót: 000000.
3. Válasszuk ki a NAM Settings opciót.
4. Változtassuk meg a Mobile Directory number 0000000000-ra.
5. Változtassuk meg a MIN1 0000000-ra.
6. Változtassuk meg a Mobile Country Code 000-ra.
7. Nyomjuk meg a menü gombot és mentsük le a módosításokat “Commit the Change”.
Újraindítás után a készülék rendelkezésünkre áll hálózati aktiválás nélkül. Elérhető benne minden jó, kivéve a mobil hálózat. És jön a következő kérdés: mit kezdjek vele? Természetesen ez csak olyan, költői kérdés volt. Internetezés, napló, számológép, idő-járásjelentés, navigáció, és még pár ötlet, melyek hasznosak lehetnek hobbink gyakorlásában:
További boldogságokhoz kicsit jobban bele kell nyúlni a droid torkába.Mivel számomra is új a terület, így kezdem az alapfogalmakkal.
Indításnál, vagy ha szakmailag korrekt akarok lenni, akkor inkább bootolásnál két lehetőségünk van: elindítjuk a teljes rendszer (betöltődik a Linux kernel benne eszközmeghajtókkal, betöltődnek a rendszer könyvtárak, felépül a Dalvik virtuális gép és az alkalmazásokat futtató keretrendszer, végül elindulnak a kedvenc alkalmazásaink) vagy recovery módban megyünk, ahol minimális de karbantartás szempontjából nélkülözhetetlen programok állnak rendelkezésünkre. Recovery lényegében egy kis program, mely rendszerszintű módosításokat végez. Gyári verziója erősen limitált képességekkel bír, de ha kicseréljük egy alternatív szabad-fejlesztésű verzióra, korlátlan lehetőségekre tehetünk szert ugyanannyi felelősséggel (erről később). Az inditási “elágazást” és részben a recovery üzemmód sajátosságait a telefon BIOSa, a boot strap firmware vagy más néven a boot loader adja. Fontos tudni, hogy a gyártók zárat építenek be a bootloader-be, hogy csak a gyártó által kiadott szoftvercsomag fusson a kemény munkával megtervezett, legyártott és programozott termékükön. Ezen zárak feloldása garancia és adat vesztéssel jár, érdemes előtte menteni!
Ahhoz, hogy jobban belelássunk a rendszer belső világában, tisztázni kell a memória felosztás kérdését. Gyakran lehet hallani arról, hogy flesh-selték az Android ROM-ját, noha ez így ebben a formában nem teljesen vagy nem mindig igaz vagy egyértelmű. A androidos mobil eszközök memóriáját általában több részre van tagolva. Az első, és talán kicsit zavaró is, hogy a rádiófrekvenciás modulnak is van saját memória része. Bizonyos esetekben erre a kis területre is tehetünk fel kis applikációkat, melyek akkor is megmaradnak, ha felülírjuk a ROM-ot.
ROM – a telefon belső tárhelye. Több, partícióra is fel van bontva, részben adatbiztossági, részben rendszerbiztonsági okok miatt. Lévén az Android is egy Linux csemete, nincsenek windowsos c:, d:, … meghajtók, hanem a partíciók egy a faszerkezetű fájlrendszerbe állnak össze. Bizonyos folderek (direktóriumok) lehetnek partíciók vagy csak folderek egy bizonyos partíción belül. Általában a BOOT, a HBOOT, a RECOVERY és a SPLASH1 külön partíciókba vannak szervezve és ezeken külön-külön le is tudjuk cserélni egy zármentes készüléken.
/boot – tartalmazza a kernelt, az initrd-t és a RAM diszk képfájlját. A kernel határozza meg hogyan működnek együtt az alkotó elemek (Tar Image vagy Zimage)
/system – tartalmazza a kernel betöltése után induló rendszer eszközeit
/recovery – úgy tekinthetünk rá, mint alternatív rendszerre
/data – felhasználó adatokat tartalmaz, RESET ennek a könyvtárnak a törlésével jár, általában ennek a partíciónak a méretét látjuk a telefonban mint belső memóriát
/cache – lényegében egy gyorsító tár
/misc – kicsit zavaró a neve, de nem hulladékot, hanem egyéb rendszerek és eszközök beállításai tartalmazza KI/BE kapcsolók formájában
/sdcard – memória kártyánk könyvtára. Miden ami rajta van a felhasználó akaratából történt
/sd-ext – sd kártyánk szeglete, melyet a rendszer belső tár bővítésére használhat. Olyan, másodlagos /data könyvtár
Természetesen, disztribúció függvényében vannak még más könyvtárak is, de ezekre nem térek ki.
Ezen kívül még két memória van a készülékben: RAM – operatív memória, ebben töltődik be a rendszer és a futó programok. Kikapcsolásnál a tartalma törlődik. SD-kártya pedig a cserélhető “külső” memória, adattár, melyre programokat telepíthetünk vagy adatokat menthetünk.
Felszabadítás folyamata
A gyártok számos zárat, lakatot tesznek a rendszerükbe, annak érdekében, hogy egyrészt a saját materiális és szellemi terméküket megvédjék, másrészt a privát és szolgáltatói adatok biztonságos kezelési előírásoknak eleget tegyenek. Ez azzal jár, hogy a felhasználok bizonyos szinten korlátozva vannak, és nem garázdálkodhatnak szabadon a rendszerben. De ahogy ez szokott lenni, erre is van megoldás:) .A zárak feloldása többlépcsős folyamat és nem mindig van szükség minden zár feloldására, bizonyos “ajtókat” pedig érdemes bezárni magunk után.
Az első lépés a root-olás. Ezzel az operációs rendszer teljes-jogú felhasználói lehetünk. Ezzel lehetőségek kapunk a rendszerünk kedvünkre való beállítását, de akár egy új operációs rendszer telepítésére a készülékünkre. Ahhoz, hogy nem gyári ROM kerüljön a készülékre a Recovery programot is le kell cserélni, mert a gyári nem engedélyezné. A HTC és sok más készülék számára az unrevoked3 és a Clockwork Mod Recovery segítséget nyújthatnak ebben. Természetesen, senki semmilyen garanciát nem vállal arra, hogy nem lesz a készülékből építőipari egység (tégla). Clockwork Mod Recovery azonkívül még számos hasznos kis programot hoz magával, melyek segítségével a zseb számítógépünk karbantartása még biztonságosabbá és egyszerűbbé válik.
Az S-OFF vagyis a rendszer biztonsági szintek kikapcsolása. Ez az eljárás engedélyezi a “tiltott” partíciók írását illetve a partíciók újraformázását, méretezését. Ehhez fel kell patch-elni a HBOOT részét a ROM-nak. HTC esetén segédeszközként használhatjuk az unrevoked forever programot. De előbb root jogokat kell szereznünk.
Ha már elértük a készüléken azt, hogy Bootloader gátlásmentes legyen és a Recovery is bővített funkciókkal bír, már csak egy lépés a készülék flash-elése. Ezzel az eljárással kicserélhetjük a ROM tartalmát: a boot loadert, a kernelt, de akár a rádiómodul beépített programját is. A ROM disztribúciók között vannak módosítatlanok (“stock“), vagyis Google által kiadott verziók, és készülék gyártói vagy szabadon fejlesztett, u.n. “custom” ROM-ok, melyek jelentősen eltérhetnek mint kinézetben, mint teljesítményben az eredetitől és általában valamilyen optimalizációs céllal készülnek. Mindig az a kérdés, mire van szükségünk. A legkedveltebben módosított ROM-ok a CyanogenMod és a MIUI.
Windows HBOOT driver telepítése (Linux/Unix alapú gépeken szükségtelen)
A GWS FW-190 modelljét már évekkel ezelőtt, az egyik első repülőgépeim között építettem. Az én készletem még abból az időből származik, amikor az EPS repülőket porszívóval kellett összeszedni esés után, úgy gurultak szét az apró habgolyócskák. Ekkor alakult ki az a módszer, amit azóta is alkalmazok, ha egy-egy hab gép kerül a kezeim közé, de erről majd később.
A Focke-Wulf gyártmányú Fw 190 a Luftwaffe egyik együléses, egymotoros vadászrepülőgépe, és kora egyik legjobb vadásza volt. 1942 őszétől egészen 1943 végéig a legjobb gép volt kategóriájában még a szövetséges gépek között is, azok csak a háború vége felé előzték meg, de mindvégig a Luftwaffe legkiválóbbja maradt. Ennek ellenére a németek vadászpilótái mégis a Bf 109-est részesítették előnyben. Főként a második világháborúban használták. A háború után a francia és a szovjet légierő is használta rövid ideig. 1941-től több mint 20 000 darabot gyártottak belőle, beleértve a körülbelül 6000 vadászbombázó változatot is.
Első bevetésére Franciaországban került sor. Az angol pilóták hitetlenkedve figyelték az új repülőt. Nagyobb tűzerővel rendelkezett, mint a Bf 109, jobb volt a stabilitása zuhanásban is, továbbá meredekebben emelkedett más repülőgépeknél, bár a Bf 109-es emelkedősebességét nem érte el. Az angliai csata során igazolta, hogy a Spitfire V-ösnél is jobb gép. Ezt elsősorban jobb manőverezőképességének és erősebb motorjának köszönhette, ráadásul kisebb mérete miatt eleve kisebb célpontot nyújtott, mint más gépek. Óriási előnye volt, hogy nem kellett minden repülési helyzetben újra trimmelni (kiegyensúlyozni), így vezetése kevésbé volt fárasztó. Ennek a repülőgépnek állít emléket a hab gépeiről ismert gyártó most bemutatásra kerülő építőkészlete.
Az akkori GWS modellek jellemzően 80-90 cm közötti fesztávolságukkal nem voltak túlságosan bizalomgerjesztőek. Kicsi, könnyű, törékeny gép, amiket nemigazán lehet irányítani sem nagyobb testvéreikhez képest. A 190-es viszont meghaladta az egy métert. Úgy gondoltam, ha sikerül kb 800 grammos repülőgépet építeni már közel leszek egy jól irányítható mégis könnyed modellhez.
A doboz tartalmazta a törzs és a szárnyak 2-2 darabját, a vízszintes stabilizátort, orrkúpot, kabintetőt pár merevítő és műanyagelemet. Futóművet nem. Nem részletezem a törzs és a szárny két felének összeragasztását. Egyszerű művelet, amivel a sárkány gyakorlatilag kész. A gyártó egy-egy széncsövet adott a szárnyak merevítésére és egy műanyag csövecskét a vízszintes stabilizátorhoz.
Akkoriban nem fogtam olyan biztos kézzel a gépeket ezért jelentősen túlbiztosítva építettem. A törzs két féldarabja közé hosszában beragasztottam egy 4mm-es szénszálas rudat, és a szárnyak és a stabilizátorok belépőéleit is egy egy 2mm-es szénrúddal erősítettem meg. Ezek egyaránt szolgálnak merevítésül és védik a szárnyat a frontális ütésektől is. A gép alsó felületét a becsült terhelések irányában üvegszálas ragasztószalaggal borítottam. Ezután következett a festés. Itt követtem el a legnagyobb csalást a modellen. Jól látható gépet szerettem volna ezért egy későbbi FW 190 D–9 típusra jellemző kamuflázs mintát választottam, ami felül zöld “ködös”, alul piros-fehér csíkos. Nem realisztikus, de nekem mégis így tetszett. Amennyiben nem szeretnénk egy átlagos akril spray árának többszörösét költeni kifejezetten habanyagok festésére való, hígítómentes termékekre a bármilyen akril festék tökéletesen megfelelő. Fújásnál azonban vigyázni kell, hogy olyan vékony rétegekben vigyük fel a festéket, amiből az oldószer gyorsan el tud párologni és nem marja meg a felületet. Az én gépemen 6-7 réteg festékkel értem el a kívánt színeket.
Az említett szénszálas merevítések a habgépes építési módszeremnek csak az egyik részét képezik. A másik az üvegszálas szalag és a “csodálatos” vastag cellux. Kis gyakorlattal a legkülönbözőbb felületek is teljesen bevonhatók és e két komponens alkalmazása gyakorlatilag törhetetlenné teszi a habgépeket. Bátran ajánlom minden kezdő számára. Tudat alatt olyan biztonságérzetet ad, hogy sokkal felszabadultabban repülhetsz meg minden figurát még a tanulás szakaszában is. Természetesen semmilyen merevítés nem helyettesíti az alázatot és a sorrendiséget, ami ahhoz kell, hogy BIZTONSÁGOSAN repíthessünk egy modellrepülőt!
Mára a gép több módosításon és baleseten is túl van. A legelső konfigurációban egy rcm-pelikán Cessna 480 motorját kapta meg. Sosem sikerült pontosan beazonosítani a motort és a teljesítményére vonatkozó adatokat, de hibátlanul működött 10×5-ös APC légcsavarral és az akkori 1300-1500mAh Lipo-kal. Futószárakat először 2,5mm es küllőből készítettem, de ezeken nagyon ingatag lábakon állt és minden leszállásnál elhajlottak, így kicseréltem 4mm-es acélhuzalra.
Egyszer aztán bekövetkezett az első baleset. Viszonylag alacsonyan próbálgattam, milyen lassan is képes repülni, amikor átesett és dugóhúzóban megindult a föld felé. Minden igyekezetem ellenére sikertelenül próbáltam kihúzni és a vége egy frontális becsapódás lett. A lezuhanással több tapasztalattal is gazdagodtam. Egyrészt tudom, hol esik át a repülőgép (ezt leírni nehéz mérési adatok nélkül, de jól látszik vezetés közben) másrészt a kategóriában használt műanyagelemek, mint például az orrburkolat úgy törik szilánkokra, mint az üveg. Először megpróbáltam megjavítani. Kitöltöttem púrhabbal a burkolat elejét. Száradás után a felesleget kivágtam, a külső felületeket epoxy-val borítottam és a festést valamelyest helyreállítottam. Az egyenletlen részeken ezüstfestékkel szárazecseteltem imitálva a sérüléseket a festésen.
A második összeállításban egy 2830-as 1300KV RCTimer motort kapott. Eddigre szabványosítottam a 2200mAh 3S akkumulátorokat, amik már nehezebbek voltak elődeiknél, így az említett kismotor már nem húzta olyan jól a sárkányt. Nem hiszem, hogy egy háborús gépet túlmotorozottra kellene építeni. Úgy repüljünk bele a figurákba, hogy tisztában vagyunk azzal, hogy elegendő sebességet gyűjtöttünk a manőver végrehajtásához, de mégis picit gyengének éreztem a teljesítményét. A végső megoldást egy 2836-os Aeolian motor jelentette, ami 10×5-ös légcsavarral pontosan azt a teljesítményt nyújtja, amivel kényelmesen lehet reptetni az immár közel egy kilogrammos gépet, melyen egy pici kamera is helyet kapott. Az orrburkolat idő közben annyira elhasználódott, a sok szállításnak és bukdácsolásnak köszönhetően, hogy végül lecseréltem egy rugalmasabb PET palackbók készített darabra.
Jelenleg egy pár hatalmas 9cm átmérőjű kerékkel szereltem fel. Köszönhetően annak, hogy minden körülmények között jól vezethető, kezes repülőmodell, ez lett az a gép, amit bátran, bármilyen körülmények között kiviszek egy kellemes “örömrepülésre” és bemelegítésre, komolyabb repülők reptetése előtt.
A Culp Special egy kevéssbé ismert, ritka típus, mindössze néhány példány épült belőle. Megalkotója, Steve Culp a Steen Skybolt-ból kiindulva tervezte ezt a kellemesen retro küllemű műrepülőt. A gép lelke a 9 hengeres Vedeneyev M14P orosz csillagmotor, melynek a 360 lóerős változata került a gépbe (ezt az elterjedt motort használták többek között a Sukhoi és a Yak műrepülőgépekben is). A géppel először egy zalaegerszegi repülőnapon találkoztam, és azonnal beleszerettem.
Amikor megtudtam hogy ez egy módosított gép, amely Veres Zoltán műrepülő Európa-bajnok számára készült, elhatároztam hogy megépítem modellként
A modellről
Tudtommal még nem épült a típusból modell ezért saját terveket készítettem hozzá, amelyekhez a gyártótól kapott háromnézeti rajzot és fotókat használtam fel. A modell hagyományos balsa/fenyő/rétegelt lemez konstrukció fólia bevonattal, metanolos motorral. A cél egy könnyű, viszonylag kis felületi terhelésű, egyszerű műrepülésre alkalmas nem túlmotorizált sportgép.
Néhány paraméter: fesztáv: 1250 mm / 1195 mm (felső / alsó szárnyon) nyilazás: 6,5°hátra (felső szárnyon) dihedral: 0° (v-állás) állásszög: +1° / 0° (felső / alsó szárnyon) profil: NACA0014 szárnymélység: 201 mm (szárnyhúr hossza) szárnyfelület: 49,2 dm2 felszálló súly: 3000 g (ez a megcélzott maximum, de szeretnék alatta maradni) felületi terhelés: 60,1 g/dm2 (max) motor: 8,5 ccm elhúzatás: 2° jobbra lehúzatás: 2°
Valahogy így nézett ki a “tervezőasztalomon”:
A törzs
A váz alapja – egy doboz szerkezet, amelyet 3mm-es könnyű rétegelt lemezből készítettem el. Kétrétegű lett a tűzfal, ennek az első rétege (4 mm kemény rétegelt lemez) már be van építve (eddig 150g):
Két oka is van annak, hogy a doboz konstrukciót választottam: Egyrészt ez lesz a gép legnagyobb igénybevételnek kitett része – ide kerül rögzítésre a motor, alulról a futószárak és az alsó szárny, felülről pedig a felsőszárny tartókonzol. Másrészt fontosnak tartom az egyenes, sík, szimmetrikus építést, amelynek szerintem legbiztosabb alapja egy olyan váz, mely minden pontban elcsavarodástól mentes, a síkjai tökéletesen egyenesek és a merőlegesek valóban 90°-kos szöget zárnak be. Ha az alapok pontatlanok, ha nincs mihez viszonyítani a méréseket, pozicionálni a további alkatrészeket, akkor az egész munka pontatlan, a modell nehezen trimmelhető és repülhető lesz… A felhasznált rétegelt lemez önmagában nem felel meg ezeknek a feltételeknek (könnyen vetemedik), megfelelő térszerkezetbe rögzítve azonban szilárd, könnyű és pontos szerkezetet alkot.
Az egyenes építés célját szolgálja az is, hogy – noha a törzs hengeres lesz – a váz alapjáról lehagytam a kerek részleteket. A fő teherviselő szerkezetet, így, az építődeszka síkján nagy pontossággal meg lehet építeni, majd később a kész, elcsavarodás-mentes merev vázra kerülhetnek a végleges formát kialakító, lekerekített segédbordák és merevítők.
Végül felkerült néhány segédborda és a tűzfal második rétege is. A hossztartók és a torziózás (elcsavarodás gátlás) ezekre a segédbordákra fog kerülni, ezért merev, hosszanti szálirányú balsa anyagot használtam.
A ragasztásra az elterjedt PVA alapú fehér faragasztó (Ponal, Palma Fa stb.) vízálló változatát használom. Fontos a jó illesztés és a munkadarabok megfelelő összeszorítása a száradás alatt: Jóval kevesebb ragasztóra van szükség (kisebb súly), és jóval szilárdabb lesz a ragasztás is. A pontosságra jellemző hogy bár a leendő farokrész helyén egyelőre csak a levegőben lógnak a főtartók, egy síkban futnak és a rajz szerinti pontban, középen találkoznak össze. Remélem a továbbiakban is tartani tudom ezt a pontosságot.
Az építést a hátára fordított törzsön folytattam. Felkerült a másik hossztartó pár és a farokrész szilárdságát biztosító merevítők. Az utolsó képen látható, hogy már befűztem a magassági kormány tolórúd hüvelyeit is. 240 grammnál tart eddig. Ha nem tudnám, hogy általában az építés vége felé száll el a súly, most kezdeném elbízni magam :).
Felkerült a törzs nagy részére a palánkolás, illetve kialakítottam az alsó szárny felfekvő felületét. A szárnyrögzítő csavarok körmös anyák kemény rétegelt lemezbe kerülnek majd.
A farokrész alsó segédbordái és hosszlécei könnyű balsából vannak. Mivel nem teherviselő elemek, különösen fontos a súlyt alacsonyan tartani. A pilótafülke mögötti felső segédbordákat a kép kedvéért a helyükre illesztettem. Jelenleg 307 g a súlya.
A vezérsíkok
A vezérsíkok ívelt kereteit (lécekből való toldozgatás helyett) balsa csíkokból lamináltam. Először nem sikerült túl jól. Vékony, 0,8mm-es balsa csíkokat használtam. Enyhén megnedvesítve, faragasztóval megkenve gondosan rásimítgattam a sablonra, aztán rácsipeszeltem.
Mint kiderült nem kellett volna ilyen sűrűn és ilyen erős csipesszel rögzíteni, a szorítás miatt hullámokban benyomódott az anyag, és ebben az állapotban száradt meg. A csipeszek eltávolítása után a hullámok részben kiegyenesedtek és az egész ív eldeformálódott, jóval szűkebb lett mint kellett volna. A végső megoldás vastagabb, 2mm-es csíkok alkalmazása lett. 24 órát áztattam őket, a felületről leitattam a nedvességet és ragasztás után csak a végeken csipeszeltem. Itt már alakul a függőleges vezérsík és az oldalkormány:
A vízszintes vezérsík kilépője és a magassági lapátok belépője laminálással készült, így jóval erősebb mintha egy darabból lenne kivágva. A középső 1mm vastag csíkból eleve kihagytam a zsanérok helyeit (mechanikai igénybevétel szempontjából ez a semleges szál). Köszi a tippet cbruder!
Hé, ki ez a torzonborz alak és mit keres a műhelyemben?!? Medve úr (pilóta) nem bírt magával, mindenáron be akart ülni a gépbe (amíg még belefér, hehe) :)
Összeállt a vízszintes vezérsík és a magassági kormányok. Hasonló módon borítottam mint a függőlegest és az oldalkormányt. Időközben egybedolgoztam és leburkoltam a farokrészt. Azt hittem könnyebb dolgom lesz, de meglepően nehéz volt a konkáv idomokat megfelelően formára csiszolni – főleg úgy hogy a balsa puha, a gitt pedig jóval keményebb. Ráadásul a súlyt igyekeztem alacsonyan tartani, ezért nem lehetett agyongittelni.
Még nehezebb volt ezeket a konkáv, erősen alakos formákat fóliázni… Az orastick (öntapadós, hőre zsugorodó és ragadó) fólia jól idomul, meglepő formákat is simán be lehet vonni vele, de ez azért feladta a leckét. Egyébként egy egyszerű háztartási vasalóval dolgoztam, szinte tökéletesen hozzá lehetett férni mindenhol – minek ehhez modellező fóliavasaló? :) Mindent egybevetve egy munkanap ráment a törzs és a vezérsíkok teljes fóliázására. Szerencsére több ilyen bonyolult forma már nem lesz a gépen, a szárnyat fóliázni ehhez képest sétagalopp lesz.
Végre kezd valami repülőformája lenni… A teljes súlya most 558 gramm a vezérsíkokkal, kormányfelületekkel és a burkolóelemekkel együtt. Ez azt jelenti hogy nagyon jól állok a súllyal, mert ezekre ~650 grammot számoltam. Tehát a szárnyakra több mint 700 gramm maradt, ami szerintem játszva meglesz. Az összes felszerelés (szervóktól a légcsavaron át az üzemanyagig) 1700 gramm, ezzel jön ki a 3 kilós felszálló súly, amit úgy tűnik sikerül tartani.
Szemfüles kollégák észrevehették hogy a cikk elején a fotón kétüléses gép szerepel, a készülő modellen viszont csak egy kivágás van a felső burkolóelemen. Nem csaltam, a Culp átalakítható együléses kivitelre is, mint az Franz Lackner úr alábbi fotóján látható. Nekem így valamivel jobban tetszik, ezért ezt a kivitelt építem.
Elkezdtem beszerelni a törzsbe a szervókat, bekötni a kormánymozgató tolórudakat és huzalokat. A két magassági kormánylap külön szervóról működik, hajlékony hüvelyben futó műanyag bevonatos acélhuzal tolórúddal (nyrod-szerű). A műanyag bevonat hosszanti bordázata miatt nagyon könnyen, szinte súrlódás nélkül fut a hüvelyben. A hüvelyt egyébként fontos legalább 5-8 centinként rögzíteni a törzsben kihajlás ellen, valamint a végeken lehetőleg minél kevesebbet hagyni szabadon, szintén a kihajlás veszélye miatt. Az oldalkormány pull-pull megoldású, acél huzallal. A snapperekre zsugorcsövet melegítettem, szétpattanás ellen. Elkészült a farokrész vezérléssel, farokfutóval is.
A középső szárnydúc (csakúgy mint korábban a pitts-stílusú kipuffogó) Dranka Pál kollega műhelyében készült alumínium csőből. Lefestettem, beépítettem – szerintem pofás lett. Beszereltem a tankot és a gázszervót / rudazatot. A tervezésnél igyekeztem figyelni a szerelhetőségre is, most ez meghálálja magát: minden kényelmesen hozzáférhető, áttekinthető.
A szárny
Az alsó szárnnyal kezdtem, bizonyos szempontból egyszerűbb mert a főtartó léceket nem kellett toldani, nincs hátranyilazva. Az eredeti gép 1° v-törését “megspóroltam”, sem repülési tulajdonságokban sem megjelenésben nem jár olyan hátránnyal mint amennyit nyertem az egyszerűbb építéssel. I-keresztmetszetű főtartót alkalmaztam, alul-felül 5×10 fenyő lécekkel, közte függőleges szálirányú, erős 2 mm-es balsa lapokkal. Második képen már a 1,5 mm-es könnyű balsából készült torziózás is látható.
Közben párhuzamosan készül a felső szárny is. A 6,5° hátranyilazást eleve az összecsiszoláskor ‘belecsiszoltam’ a bordákba, tehát a belépőléc felfekvő felülete és a főtartók-segédtartók kivágásai szögben állnak. A képen sajnos nem sikerül érzékeltetni a pontosságot, de öröm nézni hogy tized milliméteres pontossággal egy vonalban fut minden. Végre beszereztem pár csomag műanyag fejű gombostűt, eddig sima aprófejűvel dolgoztam de az több helyütt is problémákat okozott. Itt már azokkal raktam fel a felső segédtartót és a belépő mögötti lécet.
A dúcokat kemény balsából rétegelve készítettem, illetve a vége 4mm-es könnyű rétegelt lemez és arra került még balsa réteg. Sokat agyaltam hogyan lehet úgy kialakítani hogy pontos legyen az elhelyezkedése a szárnyakhoz képest – meg persze azoknak is egymáshoz képest. Végül azt találtam ki hogy alul és fölül egyaránt a főtartón és a segédtartón fog feltámaszkodni, így nem terheli a borítást és garantáltan pontos állásszöget határoz meg.
Az aránylag vékony (28 mm) szárnyprofil miatt a csűrőszervókat fektetve építem be. Hogy a könnyű hozzáférhetőség (szerelhetőség) megmaradjon, a képen látható megoldást alkalmaztam. Így is épphogy befér a szárnyba, ha nagyon behúzódik a fóliázás akkor lehet hogy meg fog látszani. Jobb oldalon látszik az egyik kitámasztó dúc, a rétegelt lemez erősítésbe pedig a merevítő huzal bekötési pontja kerül majd. A szervokarok ki lettek cserélve, mert a gyári picit rövid.
Kompozit alkatrészek
A Culp néhány alkatrésze üvegszálas kompozitból készül, helyenként karbon merevítéssel. Egyenlőre a kerékburkolatok (papucs), az orrburkolat, és a futószár lesznek ilyenek. (A futószárat eredetileg rugóacélból szerettem volna megoldani, sikerült is beszerezni a megfelelő anyagot –edzetlen formában–, de aztán az alakítás utáni edzés, hegesztés stb túl problémásnak bizonyult.) A papucsok és az orrburkolat legyártásához két részes sablonok készülnek, a futószárhoz egy egyrészes negatív. Ezekhez először az ősmintákat (ősmodelleket) kell elkészíteni.
Kerékburkolat
Először ennek álltam neki. A hosszmetszetet 6mm-es kemény rétegelt lemezből vágtam ki, kétoldalt szintén formára vágott kemény balsa tömböket ragasztottam rá. Ez utóbbi 2 cm vastag anyag volt, praktikeres balsa. Sok mindenre nem jó mert nehéz és nem is szép (amiket én láttam) de erre pl alkalmas. Mellette látható a 90 mm-es kerék. Jó nagynak tűnik egy 1250mm-es géphez de ez a scale méret. Legalább a fűben nem fog elakadni, az biztos :). Szorgalmas csiszolás után a “papucs” elnyeri a végső formáját. Még a legkeményebb balsa is elég puha és könnyen megmunkálható fa, és ahhoz hogy igazán simára lehessen csiszolni, kapott egy kis epoxy bevonatot. A balsa csöves szerkezetű, pórusos fa, úgy nyeli a gyantát hogy öröm nézni. Normális esetben ennek nem örülünk mert nehéz lesz tőle a gép mint a sár, de itt most jó mert a felületi réteg a gyantától kemény lett és pórus-tömített, sokkal jobban csiszolható. Ezután előbb fagittel, majd finomabb szórógittel javítottam a felületi hibákat. Ez ugyan elég tarka felületet eredményez, viszont a szórógitt annyira finom anyag hogy 800-as majd 1500-as papírral nedvesen csiszolva gyakorlatilag tükörsima, selyemfényű felületet lehet elérni. Tökéletes alap a festéshez/lakkozáshoz, de előbb még kell rá egy réteg szórógitt hogy a szín is egyenletes legyen, majd ezt is szép simára kell csiszolni. A lakkozást akril szórólakkal végeztem, az eredmény egész tűrhető.
Ezek a “szép simára csiszolás” mondatok egyszerűnek tűnnek, de le se merem írni hány munkaórát töltöttem velük, hányszor jöttem rá hogy elrontottam és újra neki kellett esni 80-as vászonnal a már majdnem kész felületnek, illetve hány kiló könyökzsírt használtam el hozzá :). Summa summarum, ősmintát csak szerelemből, vagy nagyon sok pénzért érdemes készíteni. Pont. Megjegyzem az akril lakk nem biztos hogy jó ötlet volt, mint közben megtudtam hajlamos gyenge láncszemmé válni a sablon első szétválasztásakor, megsemmisítve ezzel az áldozatos munkával elért felületminőséget, sajnos az ősmintával együtt. Csak remélni tudom hogy gondos formaleválasztózással, körültekintő munkával megúszom ezt a részét.
Az enyhén narancsos lakkozást vizesen felcsiszoltam 2000-es papírral. Ettől teljesen sima lett, viszont bemattult. Ezután visszafényeztem a formaleválasztó alapozásául szolgáló Marbo RS 415 pórustömítővel. Engem is meglepett hogy milyen szép fényt kapott, jó ez az anyag (igaz drága is).
Az ősminta ezzel tulajdonképpen kész, lehet is kezdeni a sablonkészítést. Először az osztósíkot készítem el. Apró trükk: lézer-nyomtatott vagy fénymásolt rajzot egyszerűen át lehet vinni fa anyagra acetonos vagy egyéb oldószeres átecseteléssel. Előtte a rajzot célszerű gombostűvel rögzíteni a munkadarabra olyan módon, hogy a papírt azért fel lehessen hajtani ellenőrizni hogy alakul az átvitel, de eközben ne csúszhasson el a papír. Az ellenőrzésre nem minden anyag esetében van szükség, de van amelyikre nem könnyen tapad át a toner. A módszer természetesen alkatrész rajzok átvitelére is használható, balsára is. Mivel az átvitelkor a rajzolat tükrözésre kerül, ha szöveget tartalmaz vagy aszimmetrikus rajzról van szó, nyomtatás előtt tükrözni kell.
Időközben engedtem a tapasztaltabb kollégák véleményének és újra lecsiszoltam az ősminta felületét hogy 2k bevonatot alakítsak ki rajt a sima akril lakk helyett. Ez a bevonat nem más mint fekete vasoxid (Bayferrox) tartalmú epoxigyanta, némi terülésjavító segítségével egész jól el lehetett simítani a felületen, majd megint csak csiszolás/polírozás (nem unalmas még? :)). Az osztósíkot szintén ezzel kentem át, ott a sík felületet frissiben ráfektetett, formaleválasztózott írásvetítő fólia biztosította. Az illesztő tüskék egy régi lemezjátszó talpai (csak formaként használom őket, a szerszámnak nem lesz része). Az osztósík és az ősminta közti rés tömítését forró ragasztós pisztollyal végeztem (aka. takonypisztoly). A kitüremkedő ragasztót az osztósík mentén szikével elvágtam, az ősminta formaleválasztózott felületétől pedig szépen elvált. Aránylag jó lett a tömítés. Gyorsan lehet vele haladni, de két tanulság:
– A Marbo 625x formaleválasztó láthatóan oldja ezt a fajta ragasztót.
– A túl pontos illesztés kerülendő mert a szűk résekbe nem jut be a ragasztó, a hajszálnyi hézag tömítetlenül marad. Bezzeg ha úgy hagynánk a gyanta annál inkább megtalálná – ezért azokat a szokásos gyurmás módszerrel tömítettem.
Ez után kialakítottam a szerszám majdani nyílásának a helyét. A celluxos körberagasztás szerepe hogy ne folyjon le oldalt a gyanta. Mély levegő után jöhet a szerszámgél. Jobban mondva nem igazi gélt használtam, házilag kevertem: SR8500 gyanta a leggyorsabb térhálósítójával, amibe nagyrészt kvarcliszt és aerosil került, illetve színezéknek vasoxid és kevés titán-dioxid (hogy ne legyen teljesen fekete). Ja és kibuborékoztató/terülésjavító adalékanyag, ami ebben a sűrű keverékben elég hasznosnak bizonyult. Mindenesetre sűrűség ide vagy oda, a kiváló formaleválasztó felületén időről időre “szétszaladt” a gyanta, ezért figyelnem kellett rá amíg el nem kezdett gélesedni – szerencsére a rövid fazékidejű térhálósító és a meleg miatt ez hamar ment. Akkor kevés kvarchomokot hintettem a felületre csatolóréteg gyanánt. Ezután kivártam azt a gyakran javasolt állapotot amikor a gél még ragad, de már nem képlékeny. Így elvárható hogy rendesen hozzáköt a következő gyantaréteg, de nem áll fönn annak a veszélye hogy elmaszatoljuk a gélt. Utána került rá pár erősítő réteg, ehhez 200g körüli szövetet és üvegvagdalékot, továbbá kvarchomokot használtam. Így utólag belegondolva talán kicsit túl is méreteztem, de annyi baj legyen. A gyanta itt már nem SR8500 volt, a szerszám hizlalásához a több éves maradékaimat használtam el. Volt vagy egy kiló FM21i-m amihez rejtélyes módon nem találtam meg a térhálósítót. Már nem is kapható, de Vegyész volt olyan kedves és kiszámolta a megfelelő keverési arányt az SR8500 egyik térhálósítójához, így azt fel tudtam használni hozzá. Köszönöm ezúton is!
Ez pedig már a kötés után a megfordított szerszámfél benne az ősmintával, az osztósík leválasztása után: (szinte csak ráleheltem és szétjött, tetszik ez a formaleválasztó!). A szerszám másik fele formaelválasztózás után a azonos módon készült. És íme, kész a szerszám. Egy kis pihenő és el lehet kezdeni a “papucsok” gyártását.
Szerszámok előkészítve az első termék kikenéséhez – formaleválasztózva. Első lépésként kikentem a formát 2k festékkel. Tudom ezt fújni illett volna, de szerencsére a festék ezt nem tudja : ). Amúgy, egyrészt nincs kompresszorom, másrészt gyanítom, hogy ezt a mintegy 6ml festéket bele sem lehetne tölteni egy rendes festékszóróba, elveszne az alján – pazarolni meg nem szeretek. Egyébként körülbelül fél óra alatt megkötött a festék annyira, hogy lehetett bele laminálni. A meleg idő is jó valamire : ).
Beleterítettem az erősítő anyagot. Amint látszik kicsit siettem, nem bajlódtam a pontos kiszabással, jókora ráhagyással vágtam ki a szövetet. A tetejébe még túl sok gyantát is használtam, nem lamináltam valami szépen. A “rétegterv” egyébként egyszerű lett (bár kissé túlméretezett), első rétegnek 25 grammos üveg a szálátnyomódás megakadályozására, arra pedig 200 grammos 2/2 twill üveg (imádom ezt az anyagot, hihetetlen jól idomul). A fölösleges, kilógó szövetet levágtam.
Ez is hamar ment, az SR8500 leggyorsabb térhálósítójával dolgoztam, a lamináláskezdetétől szűk egy óra múlva már vághattam is. Ez után összecsavaroztam a két szerszámfelet és belülről üvegszalaggal + gyantával összedolgoztam a két félterméket. Utána a termék kapott egy kis hőkezelést, nemes egyszerűséggel kiraktam egy napra az autóba, ami a napon simán felmelegszik 60 fokra, vagy még többre is. És akkor íme a késztermék. Amint látszik az osztósíknál nem lett valami szép, de attól eltekintve elfogadható.
Amint sejteni lehetett, sajnos sárnehéz lett a termék, kb 45 gramm, ami három dologra vezethető vissza:
– túl sok üvegszövet (erősebb is lett mint szerintem kellene);
– túl sok gyanta (eleve a sok szövet miatt, de meg a gondatlan laminálás még rátett egy lapáttal);
– az összeerősítéshez is túl sok plusz gyantát vittem bele.
Következő körben már jóval óvatosabb és alaposabb voltam. Kevesebb szövetet használtam (25g + 2x50g) és figyelmesen lamináltam. Ezáltal 10 grammal könnyebb lett a végtermék. Egy ekkora gépnél ennyi súlykülönbség elhanyagolható, így a másik papucsot is felhasználom.
Futószár
A futószár ősmintáját rétegelt lemezből készítettem el, majd üvegszövet erősítést kapott. A korábbiakból okulva a felület előkészítést már kizárólag kétkomponensű anyagokkal végeztem. Sablonkészítéshez szépen “körbebástyáztam” kartonnal, hogy kialakítsam a vágóéleket illetve alámetszés-mentes formát alakítsak ki. A réseket itt már gyurmával tömítettem (Bal oldalon még csak felrakva, jobb oldalon már elsimítva).
Az első karbon futószár, immár felszerelve a gépre és fóliával dekorálva, szárnyak ugyan még csupaszon, de a helyükre rakva. Talán lesz belőle valami :).
Orrburkolat
Ezt az ősmintát először XPS habból szerettem volna csiszolni/esztergálni, de sajnos ekkora méretben nem boldogultam vele. Faesztergám pedig nincs, ezért szakemberhez fordultam. Az első darab nemrég vágott élő fából készült, száradás közben annak rendje és módja szerint szét is hasadt. Próbáltam gittelgetni, javítgatni de kilátástalan volt. Újra nekiestünk, ezúttal tömbösített, szárított faanyagból készült el – ez már nagyon jól sikerült.Némi glettelés és szórógittelés után elértük a kívánt minőséget. Ezután ez is megkapta az utolsó szórógitt bevonatot, majd a csiszolást. Szép egyenletes felületet sikerült elérni. Ezt a darabot festettem is, majd ugyanazt az akril lakkot fújtam rá mint a kerékburkolat ősmintájára. Kicsit még “narancsos”, de kis polírozás ezen is segít majd. A kerékburkolathoz hasonló módon ezt is felcsiszoltam és pórustömítőztem. Az eredmény magáért beszél:
A következő lépés a szegecs imitációk felrakása volt. A módszer pofonegyszerű, fehér faragasztóba mártogatott kihegyezett hurkapálcával raktam fel őket. Az egyenes sort és egyenletes közöket papír “sablonnal” oldottam meg: asztali spirálfűzött naptárból vettem le a vastagabb borítólapot. Ebből kétfélét is használtam, mert az eredeti orrburkolaton (amennyire a rendelkezésre álló képekből meg tudtam állapítani) különböző sűrűségű – és méretű – szegecssorok vannak. A művelet könnyebben ment mint gondoltam, az egyetlen hátráltató tényező hogy a közeli szegecssorok közt várni kell a száradásra, nehogy elmaszatolódjon. Ezzel ez az ősminta is készen áll a sablonozásra.
Az idő sajnos nem igazolta a szegecs imitációs módszeremet. Néhány hét alatt szépen lepattogott az összes ragasztópötty… Ha még egyszer hasonló feladat lesz azt valami besűrített epoxyval próbálom meg, de hogy erre az ősmintára már nem fogom őket újra felpöttyögetni az biztos. Szerencsére a ragasztópöttyök alatt gyűrű alakban behúzódott a lakkréteg, emiatt olyan lett mintha süllyesztett fejű szegecsek lennének. Nem is olyan rossz, bár nem annyira látványos mint eredetileg volt. A jelenség oka szerintem az hogy először a külső ragasztóréteg száradt/szilárdult meg, egy kemény “kupolát” alkotva. Ahogy a kupolába zárt ragasztómennyiségből lassacskán kidiffundált az oldószer, elkezdett zsugorodni, és szépen rászívta a kupolát a lakkrétegre, a kemény peremével benyomva azt.
Hosszú szünet után végre volt időm elkészíteni az orrburkolat szerszámát. Nagyjából ugyanúgy készült mint a papucsok szerszáma, csak itt már jóval kevesebb anyag került bele, és igyekeztem a két szerszámfelet egyforma anyagmennyiségekkel és technológiával elkészíteni. Nagyon jó a formaleválasztó, még ezt a viszkózus szerszámgélt is képes “szétrúgni”, a gélesedés alatt is folyamatosan felügyelni kell hogy a folytonossági hiányokat el lehessen simítani. A kész szerszám ezúttal is kapott egy kis hőkezelést, egy napot a 60 fokos autóban. Szétbontás előtt kissé ideges voltam, ezt ugyanis még sima 1k akril festékekkel és lakkokkal fényeztem, volt bizonyos esély rá hogy egy része bent marad a szerszámban. (szinte hallom a kérdést, miért nem csináltam meg rendesen 2k-val… egyszerűen már nem volt lelkierőm a tükörre polírozott felületet még egyszer lecsiszolni). Szerencsére itt meghálálta magát a jó formaleválasztó, szinte sértetlenül kijött az ősminta a szerszámfelekből.
Kis takarítás még ráfér, főleg a vágóéleknél tapadt rá a gyurma. A nagy méretű helyező csapok mellé egy érdekes megoldást alkalmaztam, nem hallottam még máshol (persze attól még lehet spanyol viasz): amikor elkészült az első szerszámfél, az osztósík leválasztása után belefúrtam néhány rövidke zsákfuratot, így a másik szerszámfél ennek a pontos ellendarabja lett. Meglátjuk mennyire válik be majd a gyakorlatban, egyelőre tökéletes az illeszkedés. A gélgyanta nagyon szépen megőrizte a szegecs imitációkat, viszont valamiért karcos és kissé narancsos lett (az ősminta nem volt ilyen). Sebaj, kis polírozás megoldja majd. Hamarosan kikenem bent az első orrburkolatot, csak formaleválasztó és festék kell még hozzá.
És elkészült az első termék. Kb 100 gramm, nem tökéletes, de elsőnek megteszi. Már csak a szelepfedelek “bütykeit” kell valahogy megoldanom, és a fehér dekorációt felfesteni. Lassan kezd repülő formát ölteni :).
Ismét csomagot kaptunk Kínából.
Az első-, második világháborús harci repülőgépeknek egészen különleges, egyedülálló hangulatuk és repülési karakterisztikájuk van. Hacsak nem motorizáljuk túl őket, általában csodaszép íveket, figurákat repülhetünk velük, melyekhez elengedhetetlen a repülés és a repülőgép alapvető képességeinek ismerete. Ezek nem 3D gépezetek, nem végezhetünk velük függeszkedést, végtelen késrepülést stb. Óhatatlanul figyelembe kell venni a fizika szabályait és a konkrét géptípus jellemzőit.
A HK honlapját böngészve észrevettem, hogy megjelent náluk egy balsa építésű gyönyörűen fóliázott Spitfire 1234mm fesztávval mindenképpen versenyképes áron. Kis fórumozás után gyorsan meggyőztem magam, hogy ezt ne hagyjam ki!
“A Supermarine Spitfire, a repülés történetének egyik legnagyobb legendája nem sokkal a Hurricane után született meg, és első repülését 1936. március 5-én hajtotta végre. A repülőgépet az a Reginald Mitchell alkotta meg, akit világszerte a leggyorsabb gépek- köztük több Schneider-kupa-győztes- tervezőjeként ismertek. Mitchell 1931-ben kezdett el dolgozni egy vadászgépen, a Supermarine Type 224-en, de valószínűleg alábecsülte az igények összetettségét, ezért terve működésképtelennek bizonyult. Az angol konstruktőr ezután úgy döntött, hogy lerövidíti a fesztávot és a géptörzs hosszát, valamint bevonható futóművet alkalmaz. Az így létrejött Type 300 emelkedési sebessége még ekkor sem volt kielégítő, és a problémára csak 1934-ben érkezett megoldás, amikor a Supermarine a Rolls-Royce-szal kötött megállapodást az új típus hajtóművére, a Merlinre, amellyel a Spitfire néven ismertté vált Type 300-at felszerelték. A gép első repülése után a berepülőpilóta, Joseph Summers állítólag így kiáltott fel: “Ne nyúljanak semmihez!
Ez a gép volt a Királyi Légierő (RAF) első teljes egészében fémből épített, feszített héjszerkezetű vadászrepülőgépe. 1936. március 5.-én szállt fel első alkalommal, az új Merlin C motor mintegy 560 km/h-s végsebességet biztosított a gépnek. Az Mk.I. változat 1938-ban debütált, s a háború kitörésekor már kilenc század repült ezzel a típussal. 1940-ben jelent meg az Mk.II. 1175 lóerős Merlin XII hajtóművel. Az angliai légicsata idején ismerte meg igazán a világ ezeket a gépeket. Sikerességére jellemző, hogy a csatorna felett egyre több veszteséget elkönyvelő Luftwaffe pilóták a fáma szerint Göringtől maguknak is Spitfire gépeket kértek elkeseredésükben. A híres Mk.V.-ös 1941 tavaszán jelent meg. A gépet összesen 47 (!) féle változatban, többek között anyahajó-támaszpontú (Seafire) variációban építették. A XIV. változat emelkedőképessége az új Griffon motorral a korabeli vadászgépek átlagának csaknem kétszerese volt (1400 m/perc) és végsebessége elérte a 720 km/h-t. Ezen altípus képesnek bizonyult még a csodaszámba menő Me-262-es sugárhajtású német vadászok ill. a V-1 rakétabombák leküzdésére is. “
A gép mintázata egy MK IX-es verziót sejtet, inváziós csíkozással és sárga belépőélekkel. A fólia szépen kidolgozott, jól látszik minden illesztési vonal, csavar stb. Összességében színes, izgalmas, impozáns összhatást kelt.
A dobozt felnyitva a HK-ra jellemző csomagolásban találhatjuk a szorosan elrendezett és egyenként fóliázott alkatrészeket jó-pár liter kínai levegővel megtöltött zacskóval kipárnázva. A készlet tartalmazza a törzset, a szárnyat egyben!, a farokszárnyakat és vezérsíkokat, üvegszálas orrburkolatot, a kabintetőt, egy elektromos motortartót, a rudazatot, behúzható, alumínium! futószár készletet, kerekeket, műanyag futóműgondolákat, a futószárak takarólemezeit, farokfutót és az összeállítási útmutatót. Sajnos a verzióra jellemző hűtőrendszer alsó légbeömlőinek helyét csak a fólia festése jelzi a szárny alján, ezeket házilag kell elkészítenünk. A kithez nem jár orrkúp és aki a scale irányvonalat szeretné követni, annak bizony az antennákat, gépágyúkat stb. mind magának kell elkészíteni. Ez persze remek lehetőség eltölteni pár plusz órát a “műhelyben” és élvezni az építés és alkatrészgyártás örömeit.
Mivel az orrburkolatot sima szürkére fújták (amúgy hibátlan felületet képezve), és a kabintető “fém” részei sincsenek befestve, ezért első lépésként egy flakon matt zöld festéket vettem, hogy az orr egyszínűségét megtörjem a spitekre jellemző folttal, és a kokpit szélvédőlének rácsozatát is lefújjam. Matt festéket, mert az egész gép felülete matt. Ízlések és pofonok, de egyelőre nekem tetszik a matt fólia. Az orrburkolaton vékony fekete filccel húztam be a panelek illesztési vonalait és a csavarimitációkat is megrajzoltam. A jobb szellőzés és szebb látvány érdekében a kipufogócsonkok hátulját kifúrtam és félkörívesre martam. Mivel az orrkúp el fogja takarni csaknem az egész elülső nyílást a burkolaton még vágtam két kis vese formájú lyukat, hogy a megfelelő szellőzést biztosítsam. Utolsó simításként újra festeni fogom a gépet, de ekkor csak a korom és kopások imitációját végzem szárazecseteléssel és vízfestékkel.
Több fórumon láttam, hogy a motortartó konzolt jégkrémpálcikával, erősítették meg. Már-már azt hittem ez valamiféle általános megoldás lehet ámerikában, mindenkinél kilószámra áll rendelkezésre a pálcika. Mi nem eszünk annyi jégkrémet ezért a konzolt az élein, a ragasztási felületek mentén üvegszálas hálóval erősítettem meg. A szerkezet amúgy elég masszív, a megerősítés inkább csak a nyugalomérzetem miatt szükséges. Véleményem szerint nem szabad túlzásokba esni. Egy esetleges “orra történő leszállásnál” jobb ha a konzol nyeli el az energiát, mintha a tűzfalat és a belső szerelvényeket tolja végig a géptörzsben.
A gép borítása hibátlan, az átlagos “kínainál” jobb minőségű, vastag, kevésbé zsugorodó scale fólia. Az alkatrészek beépítését a főfutókkal kezdtem. A készlet masszív fémházas behúzható futóműszettet tartalmaz, 4mm átmérőjű szárakkal. Masszív szerkezet. A szárny borítása alatt kitapintható a kerekek és a beépítendő szerkezet pontos helye, a fólia megbontása egyszerű volt. Belül igazi meglepetés fogadott. A szárnyat 1mm-es balsalemezzel borították és a behúzószerkezetet igen jól megerősített rétegelt lemez talpazatba kell beépíteni. Reményeim szerint szépen ellenáll majd az óbudai füves leszállópálya göröngyös akadályainak és a kezdeti gyakorlatlan leszállásaimnak.
A mellékelt 45mm-es kemény szivacskerekeket a fent említett okok miatt 60mm-esre cserélem. Ez a maximális méret, ami elfér a szárnyban a bordák módosítása nélkül. Természetesen a műanyag gondolákat sem használtam fel. Az eredeti helyett (gyerekteás) papírdobozt ragasztottam a 65mm-esre tágított lukakba. Ennek felülete alumíniumfóliával borított és pontosan a kívánt átmérőjű, valamint könnyen vágható így a szárny belső felületéhez való szabás nem okozott nehézséget. Balsa helyett próbáltam ki ezt az instant(teás) megoldást és egyelőre bevált. A gondolák belsejébe nem készítettem el a két benyúló bordát, inkább egy fotóval helyettesítettem az eredeti kerékaknáról.
A főfutók behúzásáról egy darab fém fogaskerekes 13 grammos szervó gondoskodik. Mivel a tolórudak bekötése elég magasra került és nem akartam változtatni a gyári beépítő kereten a szárny borításából vágtam ki egy-egy félkört, hogy a szerkezet elférjen. A középre helyezett szervó alatt fut a szárnytartó vaskos rétegelt lemez félbordája is, ami ugyancsak nehezíti a motor besüllyesztését. Természetesen egy lapos (drága) kerékszervó megoldotta volna a problémát, de semmilyen hátrányát nem látom a magasabb szerkezetnek.
Az én gépemben a futószárak beljebb kerültek a szárny síkjától ezért a takarólemezekhez mellékelt gyári tartókat nem tudtam használni. A szükséges kb. 1,2 millimétert ezüstszínű ragasztószalaggal pótoltam úgy, hogy azt a szárakra tekerve valódi teleszkóp benyomását kelti. A fedlapokat felragasztás előtt lefestettem a szárny mintájának megfelelően fekete-fehér csíkosra. A kerekek felőli széleit óvatosan melegítve kissé behajtogattam, hogy a lehető legkevésbé álljanak el a felülettől és .
A csűrőket vezérlő szervók elhelyezése kis fejtörést okozott. Első elhatározásom szerint fektetve, egy fedőlap alá építettem volna be őket, de a fólia megbontása után a hely kevésnek bizonyult a szervók magasságához a két borda között. Nagy változtatást itt sem szerettem volna végrehajtani, így a bordák a helyükön maradtak és inkább az eredeti felfogató pontokat süllyesztettem beljebb kb 3mm-el, hogy minimálisra csökkentsem a motorokból kiálló részt. Az eredeti keretet kivágva egy másikat ragasztottam alájuk. Így a beszerelt szervók még elég “magasan” maradtak ahhoz, hogy a rögzítőszemeket befelé, a szárny irányába fordítva csavarozzam fel, ezzel nem növelve tovább a szerelvény magasságát. Külön örömet jelentett, hogy gondoltak a szervók bevezetékezésére. A nyílások alatt egy-egy cérnát találtam beragasztva, így a drótok behúzása nem okozott nehézséget a gyárilag borított szárnyban.
A farokvezérsíkok motorjait nem a gyári keretbe helyeztem el, mert abban a szervók elfoglalták volna szinte az egész pilótafülke belsejét. Igaz ezt felülről lefóliázták, de szerettem volna mindenképp pilótát ültetni a gépbe, ezért már előre gondolva helyet kellett biztosítani neki, így a két szervót az eredeti keret mögé építettem be. A figura szintén a HK kínálatából
érkezett. Eredetileg Mig-15-ös hajózóként szerepelt, de némi átalakítás után nagyon részletgazdag, igazán szép pilóta lesz. Igazából a spifire pilóták által jellemzően használt mentőmellényét és a hátranyúló hevedereket kellett pótolni és majdnem teljesen autentikus legénysége lett a modellnek. A műszerfalat nyomtatott matricával helyettesítettem, viszont a pilótafülke elülső keresztlécét és a gyári félköríves borítást kivágtam, mert az eredetin a perem alatt szinte derékszögben áll a
műszerfal konzolja. Ezt balsalemezből készítettem el majd erre került a műszerfal grafika. A pilótafülkében végső díszítésként még tervezem elkészíteni a nagyobb oldalsó kezelőszerveket, mint a gázkar és az ívelők, futómű karjai valamint a célzókészüléket a műszerfal tetejére. A gép nem scale modellnek épül, de ezek az apróságok azért sokat javítanak a látványon.
A törzsben még két apró átalakítást végeztem, az akkumulátor tartóját erősítettem meg két oldaján egy-egy fenyőléccel, valamint a tűzfal alsó részén fúrtam egy plusz lyukat, hogy a géptörzs szellőzése hatékonyabb legyen. A kivezető, szívó nyílást a farokrészen, vagy a szárny alatt tervezem.
Az akkumulátor takarója alatt bőséges a hely. A 2200mAh Li-po mellé elfér a vevő, a szervók drótjait pedig a alatta a géptest falához rögzítve vezettem el. A 3536-os motor tengelyét úgy állítottam be, hogy az orrburkolat és az orrkúp között körülbelül 2-3mm hézag maradjon. A szellőzésről előbb már gondoskodtam, itt az esztétika volt a fő cél. AZ orrburkolatot a légcsavar tárcsájához pozicionálva csavaroztam a helyére, hogy pontosan illeszkedjen a 2″-os fehér kúp.
Egy próbaakku behelyezése után következett a “puding (első) első próbája”. Vajon a módosítások mennyiben befolyásolták a súlypont helyzetét?! A legtöbb fórumon azt olvastam, hogy az ideális súlypont 7,5cm-el a belépőél mögött van. Az enyém behúzott futókkal 7,8-cm. Közel van a javasolthoz és a gyári ajánlottnál (9,5cm) jóval előrébb. A berepülésen kiderül…
Ahogy ígértem írom is a tapasztalataimat az első repüléssel kapcsolatban.
Legelőször a földön taxizgattam pár kört, mert sok helyen olvastam, hogy hajlamos az orra bukásra köszönhetően a (helyes) súlypontnak és az ezzel közel megegyező futómű bekötésnek. -Alá tudom támasztani- igaz a légcsavar nem ért földet, de magamra húzott magasságival is látszott, hogy a farkfutó éppen csak simogatja a talajt, ahogy a gép gurult a göröngyös felszínen. A függőleges vezérsík viszont bőségesen ellátta a feladatát, szépen fordította a gépet.
Elsőre egy 11×5,5 APC E légcsavarral szereltem fel. Földön maximális gáznál 39A-t vett fel tehát a levegőben bőven lesz tartalék a 60A-s szabályzón.
3 cellával 1/3 gázon megindul a földön. Először nem használtam gázgörbét, hogy ezeket a nyers értékeket le tudjam írni.
Kicsit feltámadt a szél a “gödörben”. Tudtam, hogy a finom trimmelést nem fogom tudni befejezni, de már látni szerettem volna a levegőben. Kb É-i szélben indultam, ami a pályának megfelelően jó háromnegyedes szél. Rövid nekifutás után (nem akart lent maradni szépen kifutni:) ) a földről elemelkedve rögtön megmutatta mennyire szeret szélbe állni, így nem is ellenkeztem vele és egyébként is szélbe állva emelkedtem volna. Talán az emelkedés nem is írja le jól mit művel. Úgy ment felfelé, mint a rakéta. Úgy érzem, talán a szárny és a stabilizátorok állásszögét nem találták el megfelelően. Sajnos még nem tudtam mással egyeztetni, de egyértelműen felfelé húz a gép vízszintesre állított vezérsíkkal. Nem gondolom, hogy a motor állásszöggel lenne gond, mert vitorlázásnál is ugyanez a jelenség és farnehéz sem lehet, mert nem tapasztaltam “bugdácsolást”. Alapos lefele trimmel már gyönyörűen repül egyenesen. Sőt, borzasztóan stabil. Ha a a szél nem dobálta volna ide oda néha, akkor olyan lenne, mintha madzagon húznák.
A futók behúzása után szinte nem is tapasztaltam eltérést a viselkedésében. Mivel a precíz beállítást az időjárás nem tette lehetővé igyekeztem kitapasztalni, hogy viselkedik a fordulókban, bukfencben, orsóban. Nyilván elfogult vagyok, de csodaszép látvány, ahogy a spit kanyarodik, szép nagy íveket ír le. Azért kipróbáltam a szűkebb fordulókat is nagyobb sebességen, de ezekből sem esett ki. -Hatalmas lapát szárnyai vannak jó profillal- nehezen esik át lassú sebességnél is. Motor nélkül is úgy repül, mint ami le sem akar jönni az égből. Aki ismeri az óbudai pályát, annak szemléletesebb, hogy az Y elágazástól majdnem a rét közepén álló fáig siklott, miközben nem éreztem, hogy korrigálnom kellene a magasságon. (kár, hogy pontosan nem tudtam sülyedést mérni, legközelebb talán lesz lehetőségem egy loggert is megreptetni fromi kolléga jóvoltából:) ).
A leszállásnál bele is futottam megint ebbe a tulajdonságába. Pontosabban inkább ő futott ki a pályáról alaposan, de bevallom, nem mertem lejjebb engedni elsőre. Így miután elszáguldott előttem és eléggé lelassult szélbefordulás után messze szálltam le. -naná, hogy egy gödörbe és megrepesztettem a jobb futó alatti fát-. De azt a hibát gyorsan javítottam, megtanulni a kijelölt helyre leszállni hosszabb lesz..
Első lépésként mindig egy előre kivágott alkatrészekből álló építődobozt (kit) ajánlok mindenkinek. Ezzel gyorsabban haladunk, és általánosabb kérdésekre koncentrálhatunk egyenlőre. Egy ilyen doboz általában tartalmazza a szabott anyagot, tolórudakat, néha ragasztót és talán pár kelléket.
Ha még mindig nem köteleztük el magunkat teljesen, de belekóstolnánk a gépépítésébe, csak a legszükségesebbeket szerezzük be; a következőket hagyjuk ki egyenlőre: bevonó fólia, motor, üzemanyagtartály, rádióelektronika, kiegészítő kellékek (motortartóra azonban szükségünk lesz tűzfal kialakításánál). Ezen kellékek nélkül meg lehet építeni a modellünket és ráadásul elég sokba is kerülnek, de több évre szólnak, nem érdemes spórolni rajtuk, inkább minőségre kell törekedni.
Ha már végleg eldöntöttük, hogy ezen ősi hobbinak hódolunk, érdemes a következő listát szem előtt tartani, mert ezek végső soron meghatározzák a modellünk végső konstrukcióját. Lényegében lényegtelen, hogy nagyobb vagy kisebb gépet építünk, a lista marad, csak az alkotórészek paraméterei változnak. Érdemes egy 1-1.5m fesztávú gépben gondolkozni a stabilitása miatt (természetesen más tényezők is befolyásolják, nem csak a méret és tömeg). Lássuk, mire lesz szükségünk.
Motor – .40cu, azaz 6.5 cm³ kétütemű motornak megfelelő belsőégésű vagy villanymotor (~0.8LE, 600W); Motortartó – öntött alumínium vagy műanyag, melynek rögzítéséhez szükség lesz csavarokra és füles anyákra; Izzítógyertyák – motornak megfelelően; Izzító – biztosítja a izzó gyertyának a megfelelő áramot, ezáltal berobbantva az üzemanyag-keveréket a henger munkaterében; Üzemanyagtartály – motor fogyasztásának megfelelően, körülbelül 20 percnyi repülésre elegendő üzemanyag férjen bele (~150-200ml). Általában ennyi idő után, a pilótának is kell egy kis pihenő, illetve, ha közösen használjuk a légteret idő időnk elteltével illik átadni más pilótának a légteret; Gumiszalagok; Kerék garnitúra– 50-80 mm átmérőjű; Futó szárak – általában 3-4mm acélhuzal, vagy alumínium – ezek tartják majd a kerekeket; Szervók – ezek irányítják a repülő vezérsíkjait; Távirányító – legalább 4 csatornás, de ajánlott 6; ha vitorlázó-repülni is akarunk, akkor 8 csatornás ajánlott exponenciális válaszgörbével; Vevő – távirányítónak megfelelő egység, mely fogadja a jeleket és ennek megfelelően irányítja a szervókat; Vevőakkumulátor – 5-6 V feszültségű, 800-2000 mAh teljesítményű akkumulátorcsomag, mely elég energiát biztosít a vevő egység és a szervók számára; Tolórudak – lehetőleg acélbovden legyen nejlon házzal; kisebb gépeknél szén vagy üvegszál rúd is lehet. Ezek adják át az erőt a szervótol a kormányemelőkön keresztül a vezérsíkoknak; Kormányemelők – ezekbe rögzítjük a tolórudakat és belefúrjuk, ragasszuk a vezérsíkokba; Légcsavar – függ a motortól és a gép sebességétől; Habszivacs – ebbe csomagoljuk a vevőt és az üzemanyag tartályt vibrációcsökkentés céljából; Üzemanyag – ha reptetni akarjuk a modellt, szükségünk lesz 18-20% olajtartalmú (tiszta ricinusolaj vagy ricinus és szintetikus olajkeverék 50-50%) metanol üzemanyagra és egy kis (0-15%) nitro-metán doppingnak; Üzemanyag-vezeték – általában 2-3mm belső átmérőjű szilikoncső. Ezekkel kötjük össze az üzemanyagtartályt a motorral és a kipufogóval. A túlnyomás biztosítja a folytonos üzemanyag-utánpótlást bonyolult figurák kivitelezésénél; Üzemanyag-ballonvagy pumpa – a gép töltését segíti; Bevonófólia – műanyagfólia, mely hő hatására hozzátapad a gépfelületéhez, majd magasabb hőmérsékletnél elkezd zsugorodni, így erősítve a szerkezetet; Fóliavasaló textil huzattal – melegíti a fóliát és kiteríti a felületen; Startpanel – kell valami a mezőn, ami ellátja a kiszolgáló elektronikát: üzemanyagpumpa, starter, izzító; Starter – 1000-2000 percenkénti fordulatra képes motor gumírozott adapterrel, üzemi fordulatszámra viszi fel a motor fordulatszámát, megvédi a modellező ujjait;
Abban az esetben, ha csak a keretet akarjuk megépíteni, akkor ezekre nincs szükség, de repüléshez nélkülözhetetlenek. Elektromos meghajtású gép esetén kicsit más a kép. Igazából, sok minden fölöslegessé válik, így nincs szükség üzemanyagra, tartályra, pumpára és vezetékekre, de szükség lesz:
LiPo akkumulátor – nagy teljesítményű akkumulátor, motor és fedélzeti elektronika táplálására. Néha az elektronikát NiCd elemekkel táplálják mert olcsó és nem igényel feszültségkorrigáló elektronikát; BL motor – vagyis kefe nélküli motor – viszonylag olcsó, hosszú az élettartalma, jó a hatásfoka de viszonylag drága a vezérlő elektronika hozzá; Motorszabályzó – magasan integrál áramkörrel vezérelt elektronika a motor megfelelő üzemeltetéséhez; BEC – elektronikus stabilizátor, mely a vevő egység és a szervókat táplálja. Általában 2 méter alatti gépeknél a szabályzó BECjét használják (3-5 A); Balanszer töltő – “intelligens” elemtöltő, mely a kényes LiPo akkumulátor töltését végzi, kiegyenlíti a cellák között fellépő feszültségeltéréseket;
Lényegében, ennyi kell, hogy egy gép levegőbe emelhető legyen. Természetesen, jó pilóta nélkül sokáig nem marad ott.
Kívánom ehhez mindenkinek kellemes időtöltést és sok sikeres landolást.
Ezen témán belül olyan megoldásokat gyűjtöttem, melyek csak többéves tapasztalat és interdiszciplináris tudás, több próbálkozás és hiba révén születnek. Nem én találtam fel ezeket, csak összegyűjtöttem és rendelkezésre bocsátom az idelátogatók számára egyszerű formában, hogy a kezdők is alkalmazni tudják. Egyes modellezők a bolti megoldások hívei és nem hajlandóak a kompromisszumra. Nem mondom, hogy ezek tökéletes megoldások, jobbak, vagy rosszabbak. Ezek alternatívák vagy tapasztalatok eredményei. Ki kell próbálni, és ha beválna, alkalmazni.
Tipp: Használj szódabikarbónát hézagkitöltéshez illetve CA aktiválásához. Ez az ártatlan anyag igen nagy szolgálatot tehet modellépítésünk során. CA (ciánakrilát) pillanatragasztó – széles körben alkalmazott ragasztó; modellezésben is (2-octyl cyanoacrylate tartalmú ajánlott, mert kevésbé mérgező). Vékony rétegben gyorsan köt (polimerizálódik) víz ill. hidroxid-ion jelenlétében. Vastag rétegben vagy kötési idő lerövidítése érdekében gyorsítót (Accelerator vagy szódabikarbóna telített oldatát) használunk. Rés/hézagtömésnél dörzsöljük be a szódabikarbónát, utána CA ragasztót adjunk a felületre (így habanyagok ragasztására is alkalmas). Vegyük figyelembe, hogy a gyorsított polimerizáció érezhető hőkibocsátással jár. CA polimerek hő és nedvességtűrő képessége alacsony.
Tipp: Tisztítsuk a vasaló talpát textíliával vegyszerek helyett. Előfordul, hogy fóliázás során egy kis fólia, ragasztó ráolvad, ráég a vasaló talpára. Bár alapvetően ilyen munkálatok során célszerű egy pamut “zoknit” húzni a vasalóra, így védve a vasalót a fóliától, és a fóliát a vasalótól. De ha mégis tisztítani kell, gyakran elég felfűteni a vasalót és egy pamutba burkolt falemezzel vagy egy szappannal le tudjuk kaparni a ráolvadt műanyagot. Makacsabb foltok esetén fémforgács dörzsi a segítőtársunk.
Tipp: Üzemanyagálló festék epoxigyantából. Üzemanyagálló festékek általában igen drágák, epoxigyanta meg mindig akad, de elég sűrű. Ezen probléma kiküszöbölésére melegítsük fel a gyantát hőlégfúvóval, de inkább tegyük bele 5-10 percre forró vízbe. Ezután már használható motor- és üzemanyagtér festésére. Vegyük figyelembe azonban, hogy a hevítés során a gyanta kötési ideje körülbelül a felére csökken. Vagyis 30-60 perc vagy hosszabb kötésidejű gyanta ajánlott. Színezéshez keverhetünk bele egy kevés lézernyomtató tonert.
Tipp: Csiszolókocka olcsón. Barkácsboltokban jó-pénzért lehet vásárolni csíptetős, szivacsos csiszoló szerszámokat. De kivitelezhető csupán csiszolópapír árából is. Ehhez szükségünk lesz kb. 15mm vastag farost vagy rétegelt lemez hulladékra, melyet lapszabászaton sok szeretettel és ingyen adnak, csak ne kelljen kerülgetni. Igény szerinti formákat és méreteket vágunk, és csiszolóvászonnal borítjuk egy vagy több oldalát (ne használjunk papír alapú vásznat) faragasztóval ragasztva és egyenes felülethez szorítva.
Tipp: Fóliázás okosan. Fóliázás során mindig szoktam figyelni, mi fogy el idő előtt a fólia vagy az éles penge. Érdemes megkörnyékezni egy patikát és vásárolni egy-két cserélhető pengéjű szikét és egy csomag pengét hozzá, vagy hobbi boltban 11. számú hobbi pengét legalább 50 darabos kiszerelésben. Tompa penge használata gyűrődéshez és a bevonó fólia újabb adagjának vásárlásához vezethet. Tehát a korai penge csere kifizetődő.
A fóliázás vagy távol az építő felülettől történjen (ami általában hab borítású és sérülhet a hőtől vagy pengétől), vagy takarjuk le kemény kartonnal, üveggel. Pengék élettartalmának meghosszabbítása érdekében használjunk patchwork vágólapot, mely 5-7 PVC rétegből áll, és a külső puha réteg önregeneráló tulajdonsággal is bír. Ezen a lapon körvágót is használhatunk. De a vasalót tartsuk távol tőle!
Tipp: Denaturált szesz epoxigyanta ellen. Kifolyt, kicsöppent, fölösleges gyantát el tudjuk távolítani denaturált szesz segítségével. Lényegében nyomtalanul feloldja a még meg nem kötött gyantát. Óvatosan kell bánni vele, mert gyengítheti a ragasztandó felületek közti kötést. De ha munkafelületünk tisztításáról van szó, használjuk bátran. Kezünkről a ragasztót papírtörlővel, ruhadarabbal töröljük le, és azután mossuk meg kezünket langyos szappanos vízzel.
Tipp: Illesztések többszörös ellenőrzése. Kissé elcsépeltnek tűnhet, de a hibák halmozódnak, ezért törekedjünk a tökéletes illesztésre ragasztásnál. A majdnem jó végeredménye görbe, csavarodott törzs, szárny. Nincs kivétel kitek esetében sem. Nagyobb felületeknél is rakjuk ki a részeket a tervrajzra, bizonyosodjunk meg az illesztések jóságában és csak utána végezzük el a végső ragasztást (tervrajz és alkatrészek közé terítsünk Folpackot vagy más vékony átlátszó fóliát). Fő ragasztó mellett kis mennyiségű CA ragasztót is szoktak használni, hogy a ragasztandó részek véletlenül ne csusszannak szét.
Tipp: Csavaranya beragasztása. Füles vagy körmös anya beragasztása elég gyakran bosszús véget ér, mert a ragasztó vagy a gyanta befolyt és megkötött az anya belsejébe, ezzel használhatatlanná téve azt. Ez könnyedén megelőzhető, ha a menetes részét kitöltjük vazelinnel vagy szilikon zsírral. Ezen anyagok megakadályozzák a ragasztó befolyását a menetbe és a fémhez való kötését ezért ügyeljünk, hogy az anya külsejére ne kerüljön zsír (szigetelő szalag, cellux használat általában nem hoz pozitív eredményt).
Tipp: Használt küllő tökéletes alapanyaga lehet egy menetes szárnak, ezenkívül jó szolgálatot tehet vezérsíkok, futószárak kialakításánál is.
Tipp: Festéket, ragasztót mértékkel. Nyilvánvalónak tűnhet, de a kevesebb néha több; ne pazaroljunk. A fölösleges ragasztó többletsúlyt jelent, amelynek eredménye a gép megnőtt tehetetlensége. RC modellek esetén meg kell küzdeni minden grammért. Ne hizlaljuk fölöslegesen a gépet. Ráadásul még csúnya látvány is.
Tipp: Két egyforma elem készítése. Ha az instrukció szerint 2 egyforma rácsot kell készíteni, a másikat közvetlenül az első fölé építsük. Ezzel tudjuk biztosítani a tökéletes egyezést. Fedjük le az első elem illesztéseit ragasztószalaggal, zsírpapírral vagy Folpack fóliával a második elem összeragasztása előtt, megakadályozva ezzel a 2 elem közti kötés kialakulását (ne fedjük le az egész elemet, csak a ragasztási felületeket). Természetesen, mindezt csak sima, egyenes felületen kell elvégezni. Egyéb esetben egy csavarodott törzsünk lesz, és egy ilyen gépet lehetetlen kitrimmelni.
Tipp: Domború ívek fóliázása ráncok nélkül. Első lépésben hevítsük fel a fóliát, de ne tegyük rá az ívre. Magasabb hőmérsékletnél a fólia nyújthatóvá válik, így könnyen igazítható az idomokhoz.
Tipp: Biztonságos balsafa-hajlítás. Néha szükségünk lehet ívelt felületek kialakítására. Ilyenkor szokták melegíteni a fát, gőzölni (vizes textília és vasaló segítségével) de a legegyszerűbb, ha benedvesítjük a fát 4:1 arányban vízzel hígított denaturált szesszel (~20% alkohol). Spray formában könnyen tárolható és alkohol miatt gyorsan szárad.
Tipp: Jaj, behorpadt a faelem. Ne is próbálkozz a csiszolással, ha nem csak kis karcról van szó. Ehelyett inkább egy nedves szalvétát, vagy textíliát használjunk, és egy forró vasalót. Beszivárgott nedvesség hő hatására tágul, és belülről javítja a horpadást. Több milliméteres horpadások esetén is működik a módszer, de minden esetben érdemes előtte kipróbálni egy kisebb fadarabon.
Tipp: Nehezen hozzáférhető elemek csiszolása. Ha netán olyan helyen kell csiszolni egy elemet, melynek közvetlen közelébe egy másik helyezkedik el, a csiszolástól védendő felületet egy öntapadó szalaggal védjük. Figyeljünk oda, hogy a szalagot ne csiszoljuk át (előfordul).
Tipp: Faléc méretre vágása. Sokszor kell méretpontosan vágnunk balsa, fenyő vagy más anyagból készült lécet. Vágjuk mindig kicsit hosszabbra. Ne próbálkozzunk pontos vágással. Általában rövidebbre sikerül gyarapítva a hulladék mennyiségét. A méretre igazítást csiszolókockával elvégezhetjük, de fát nyújtani még nem sikerült.
Tipp: Mérjük meg kétszer. Legyen szó tömegről, térfogatról vagy hosszról, a biztonság kedvéért merjük le legalább kétszer. Több előnye is van: elvégezzük az önellenőrzést, kevesebb hulladékot gyártunk. Emellett fáradsági szint mérésére is jó: ha gyakran hibázunk, ideje lelassítani vagy pihenni.
Tipp: Nem csak Hobbi boltban lehet vásárolni. Ettől páran a falat kaparják, mondván tákolás. De sok mindent olcsóbban lehet beszerezni barkács-, festék-, autósboltban. Néha érdemes nagyobb kiszerelést választani, így jut modellező társainknak is. Hobbi boltok jól keresnek azon, hogy az emberek türelmetlenek és azonnal kell nekik ez-az (én is támogatom a boltokat néha némi apróval). De ha ésszel, türelemmel és odafigyeléssel vásárolunk, sok pénzt spórolhatunk meg.
Tipp: Első gép vásárlása. Ha már készen állunk az első repülőgép vásárlására, ne vásároljunk olcsó műanyag játékot, mert az játék, nem modell; általában az elektronikája is silány minőségű, és általában nehezen javíthatók. Költsük pénzünket okosan, fektessünk be inkább egy balsa/rétegelt-lemez építődobozba vagy egy CNC vágott kemény-hab gépbe. Az utóbbinak előnye, hogy szinte törhetetlen, de tisztában kell lenni, hogy ezen nem tudjuk elsajátítani a precíz repülést.
Tipp: Belsőégésű motor indítása. Motor indítása előtt győződjünk meg, hogy a keveréket dúsra állítottuk. Ezzel többlet kenőanyagot juttatunk a motorba. Tűszelep segítségével a keverék egyszerűen állítható (beállítás részletei a motor használati utasításában), de általában három és fél fordulat a szelep teljesen zárt állapotától számítva megfelelőnek bizonyult. Ha új motorról van szó, legalább egy tanknyi üzemanyagot szánjunk bejáratásra (50% teljesítményen), hogy bekopjanak az alkatrészek, és négyütemű motoroknál ellenőrizzük a szelepek és a himbák közötti rést. Ezután be kell állítani az üzemi keveréket, mert a dúsított keverék a motor leadott teljesítményét rontja. A motor bejáratását el lehet végezni próbapadon, de akár közvetlenül a rögzített gépbe beépítve is.
Tipp: Gép tisztítása. Üzemnap végén a repülőgépeket érdemes letisztítani, a vegyszert lemosni, és szárazon a biztonságos tárolását biztosítani. A tisztítás különösen fontos belsőégésű motorok esetében, mert az üzemanyag és olaj szennyeződéseket kötelező jelleggel el kell távolítani (de ott lehetnek még a bogár áldozatok és esetleg a fűfoltok, melyek elszínezhetik a gép borítását). Ráadásul, az idő múlásával egyre nehezebb eltávolítani a szennyeződéseket. A legjobb, ha még a reptéren letisztogatjuk a gépünket. Egy lehetséges recept a tisztító folyadékhoz: víz, pár csepp autó-sampon (ha nincs, akkor folyékony szappan, mosogatószer), 2-3% szalmiákszesz.
Tipp: Rézcső hajlítása. Törés-mentesen meghajlítani egy réz vagy bronzcsövet (legjobb választás üzemanyag vezetékekhez) néha egy igazi kihívás. Egyik jól bevált módszer, ha nagyon finom homokot töltünk a csőbe hajlítás előtt. A jó eredmény egy kis gyakorlatot igényel.
Az egész modellezési őrületem akkor kezdődött, amikor karácsonyra egy kisebb gépet kaptam ajándékba. Háromcsatornás RF (Ready-to-Fly) EPO modell volt, de az akkumulátor első töltésénél kiégett a töltő, így elkértem a számlát az ajándékozótól, és amikor megláttam az árát, úgy döntöttem, visszaadom a boltnak az egészet. Végül megegyeztünk abban, hogy adnak 1-2 hét gondolkodási időt, hogy kiválasszam, mire szeretném beváltani. Akkoriban minden szabad időmet az RC modellezés témakörének szenteltem, hogy el tudjam dönteni, mivel is repüljek, és egyáltalán: hol kell elkezdeni. Végül egy CNC vágott EPP Extra gépezet mellett tettem le a voksomat. A visszavitt gép árából vettem még hozzá egy lítium-polimer akkumulátort, 4 szervót és egy motorszabályzót. Kevéssel később sikerült vennem egy Dualszky motort és egy jó állapotú használt Futaba 6EX távirányítót vevővel , majd lassan elkezdtem összerakni a masinát.
A géphez kapott leírásra és az elmúlt 3 hét olvasmányaira támaszkodva belekezdtem a gép merevítésébe. Kijelölve a rudak helyét, magas-fordulatszámú kéziszerszám 1,5 mm vágó korongjával kis árkokat martam a habba; a rudak ragasztása epoxigyantával történt. A gép törzséhez két, 1,8 mm vastag szénrudat használtam, illetve négy darabot a szárnyaknál. Csiszoltam egy kicsit az éleken, és úgy tűnt, hogy az éleket is védeni kellene. A farokrész depronból készült vezérsíkjai is kaptak élvédelmet.
Következő lépésben a szárnyfelek összeragasztását illett volna elvégezni, de az úgy túl egyszerű lett volna, így inkább 2-2 lyukat fúrtam a szárnyak hosszirányába. Az egyik szárnyfélbe karbon csövek, a másikba rudak kerültek. Az egyik csövet átfúrtam, és egy M3 csavaranyát ragasztottam a furatba, így összeszereléskor a csőbe tolt rudat csavarral rögzíteni tudtam. Hogy a szárny el ne mozduljon a neki szánt helyéről, a törzs kapott két pengét a “hátába”. Most már minden ‘merőleges’…
A hátsó kerék úgy lett ragasztva, hogy az oldalkormány és a kereket mozgató szerkezet forgástengelye egybeessen. Ezután már csak ki kellett szedni egy kis habot a törzsből – helyet csinálva ezzel a szervóknak. Végül a motortartó bak is a helyére került. Köszönet a keménykötésű gyantának a (ki)tartásért! Ezután már csak a festés maradt és a végső összeszerelés.
A festés akril festékkel lett elvégezve ecset segítségével. Sajnos ez a technika a porózus anyaggal párosulva 50 grammal “kövérített” a gépen. Nem jó hír, de tanulságos. A fülkét tükörfóliával sikerült díszíteni.
Helyére került az elektronika, minden rendben találva (össztömeg 486g) – már csak a jó időjárás a hiánycikk. Sajnos, a téli időjárás erősen szeles. Egy keveset várnom kell még a berepüléssel. Addig marad a szimulátoros repülés.
2009.03
Eljött a berepülés ideje. Bár még mindig fúj a szél, de legalább nem esik. Még nem sokan javasolták az első repülést 15 km/ó széllökéseknél. Gép az autóba és irány a mező – lesz, ami lesz.
Az első repülésemre elég sokáig készülődtem, de bármennyit is szimulátoroztam, ott nem fújt a szél. Ráadásul a levegő hőmérséklete a mezőn 10 fok körül alakult. Egy kevésbé megfontolt pillanatban elengedtem a gépet, és meglepetésemre: repült. Kellett ugyan rajta trimelni, de a levegőben maradt – bennem meg tombolt az adrenalin. Bár alig repültem a géppel 5 percnet, nagyon hosszú időnek tűnt. Leszállás… Egyben maradt. Kis pihenő – míg a haver repült pár kört. Akkumulátorcsere, aztán megint mehet kis repülőm a levegőbe. Nem volt egyszerű, de tudtam tartani a gépet, amíg egy fordulóban a szél fejre nem állította.
A második repülésem sötét oldala: mélyrepülés kb. 15 méter magasságból, utána 5 méternyi sávon fűkaszálás. Károk: 4 pici lyuk az oldalkormányon. Igazi túlélő! Én is átestem a tűzkeresztségen. Innentől kezdve már egyre kevesebbet remegett a térdem. :)
Mit tanultam közben? Azon kívül, hogy minden alkatrészt egyedül szereltem, ragasztottam, festettem, kiemelném a következőket:
ha éppen az elektronikával babrálsz, szedd le a propellert előtte — teszt során sok kárt tud okozni
ha lehet, ne ecsettel, hanem szórópisztollyal – leheletvékony rétegekben – vidd fel a színező maszatot (festéket)
mindegy hány éve repülsz, mindig lesznek lábrengető repülések
élvezd, amit csinálsz :)
2013.06
Az első repülésem óta sok víz lefolyt már a Dunán, és túl vagyunk már egy-két felszálláson. Itt az ideje kicsit tuningolni a kis kedvencemet. Kis gyakorlás gyanánt a repülőgép farokrésze balsából készült, a teteje pedig piros fóliát kapott.
Elővettem az eredeti alkatrészek körvonalrajzait és azok alapján készítettem el az elemeket, utána pedig bevontam Oracover fóliával. A fólia meg is mutatta, hol hibáztam famegmunkálás közben, de nem vészes. Legközelebb nagyobb odafigyeléssel csiszolom.
Egy 3D törzset is megérdemelt, és hogy még szebb legyen, a felső részét balsával borítottam, mely szintén kapott piros fóliát, meg rendes pilótafülkét plexiből. Ehhez – pár lécből – vákuumformázót készítettem, és szerettem volna venni a …kerben Gutta nevű 0,6mm plexi fóliát, de fél éve elfogyott. Ezért EPP maradékból készítettem fülke “buborékot”, üvegszövettel megerősítettem és utána addig políroztam viasz hozzáadásával, míg szép fényes nem lett. Utána beleraktam egy vékonyfalú PET palackba, és felhevítettem. Zsugorodása során a palack felvette a buborék formáját. Egy kis simogatás, csiszolgatás, vasalás, és megújult formában repülhet a madárka.
Egy kis trimelés után a “kicsi gépecske” stabilan repül, és ha enyhe körpályára kényszerítem, perceken át benne marad a beavatkozásom nélkül.

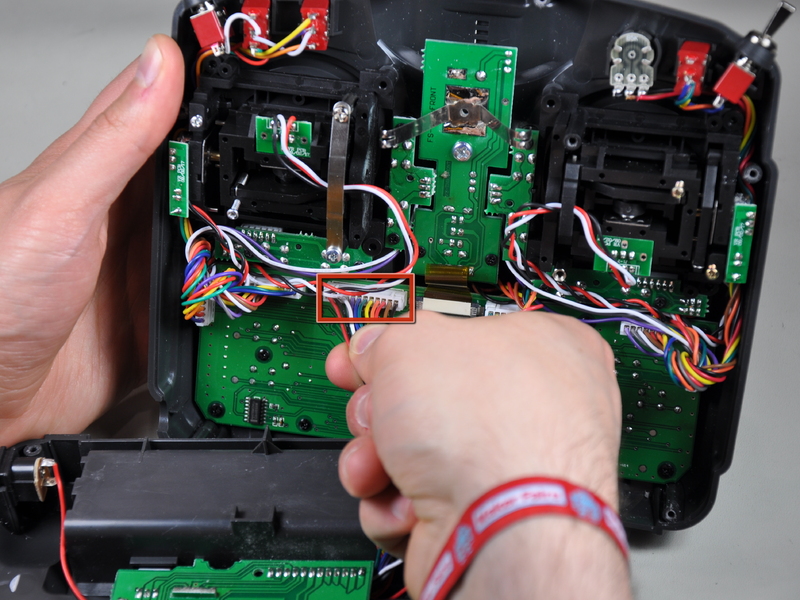
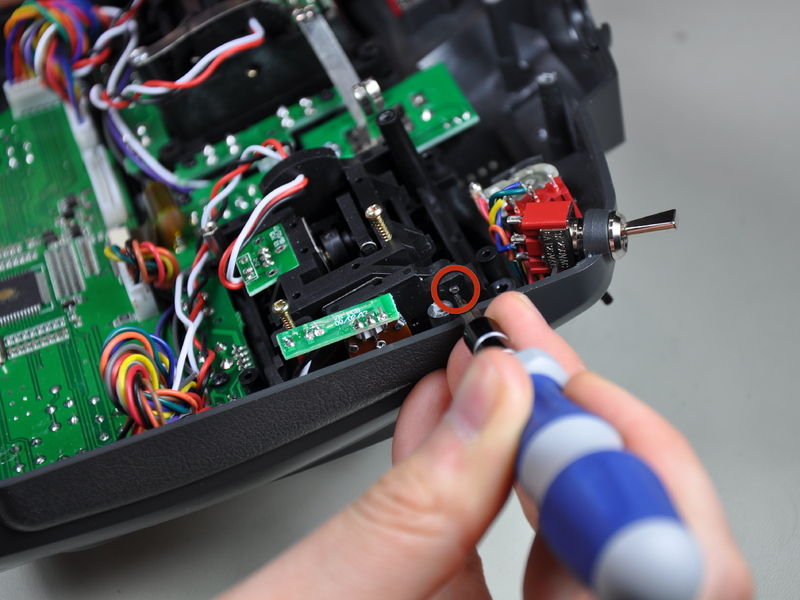
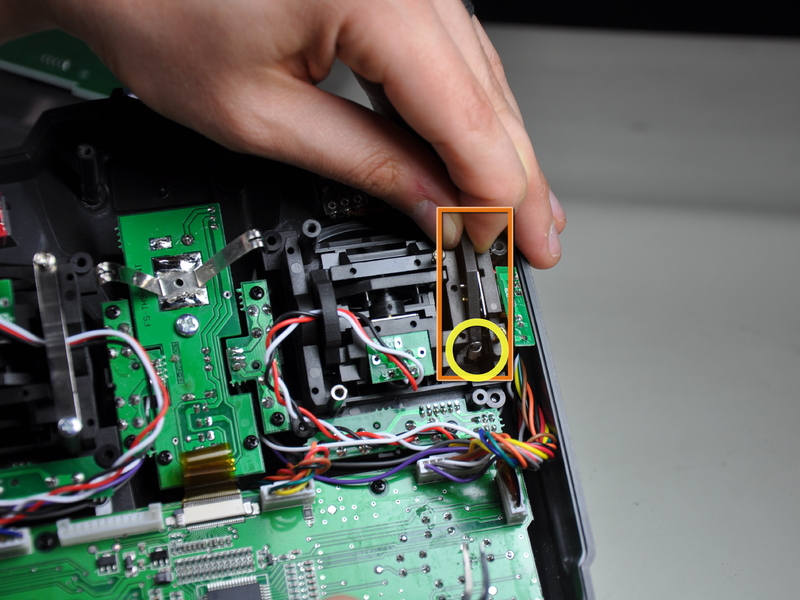
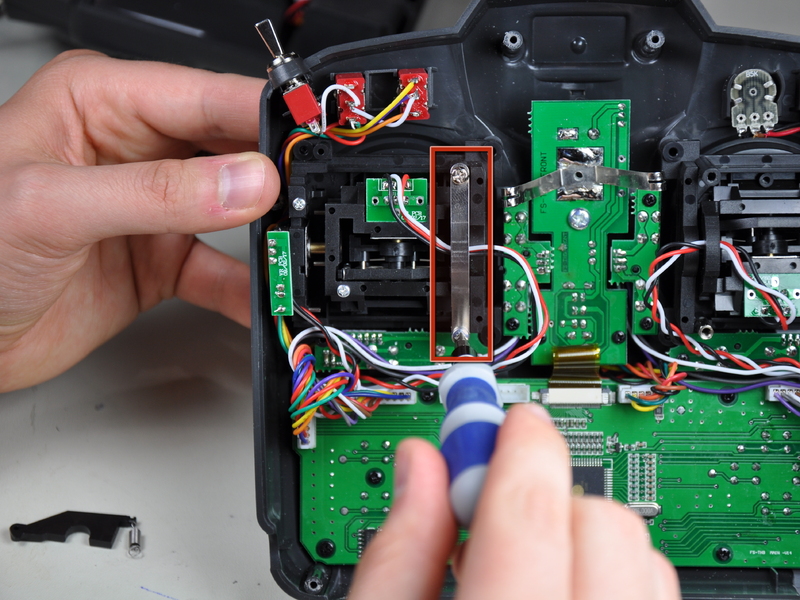

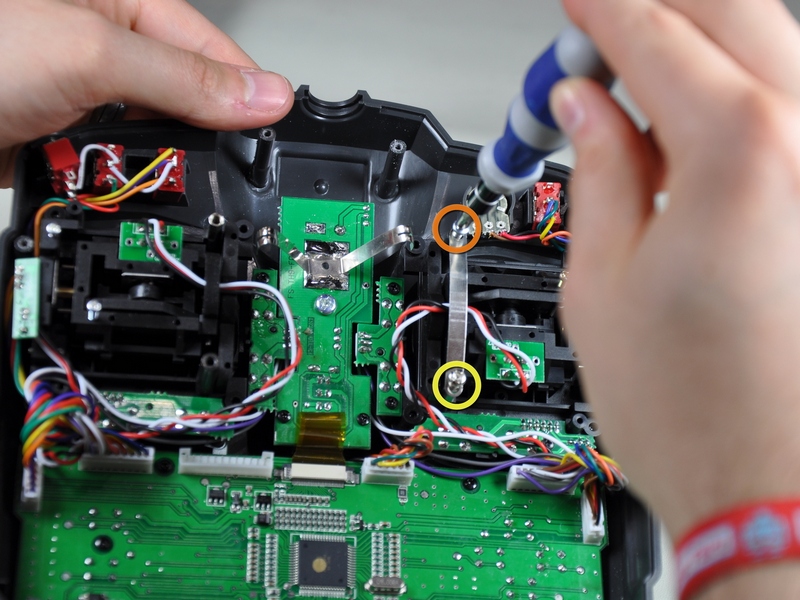
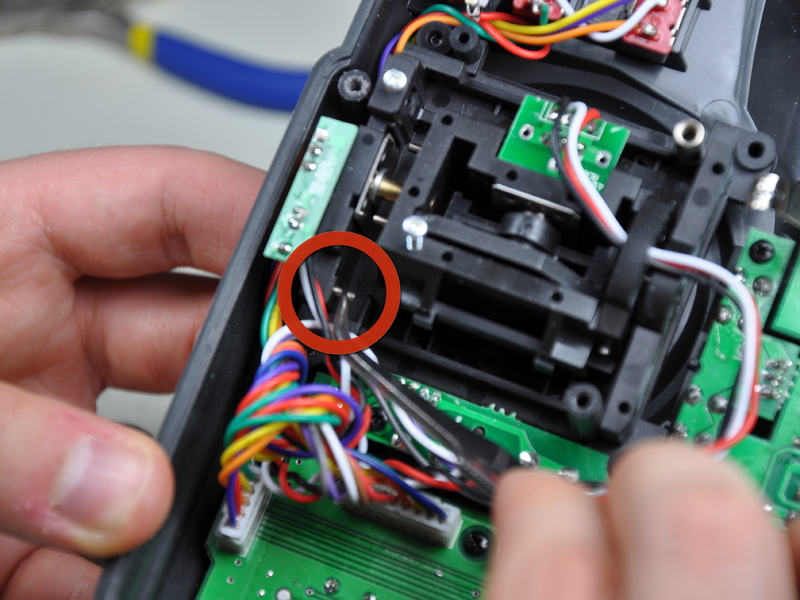
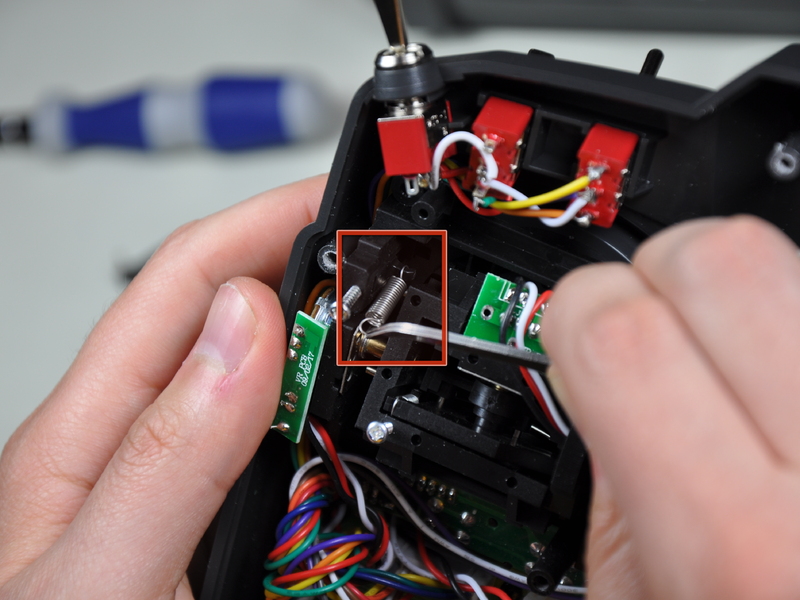
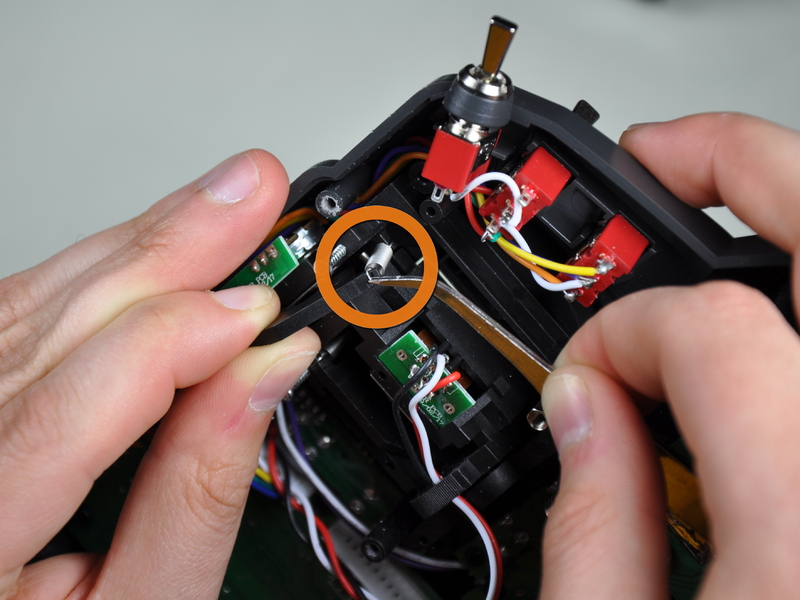
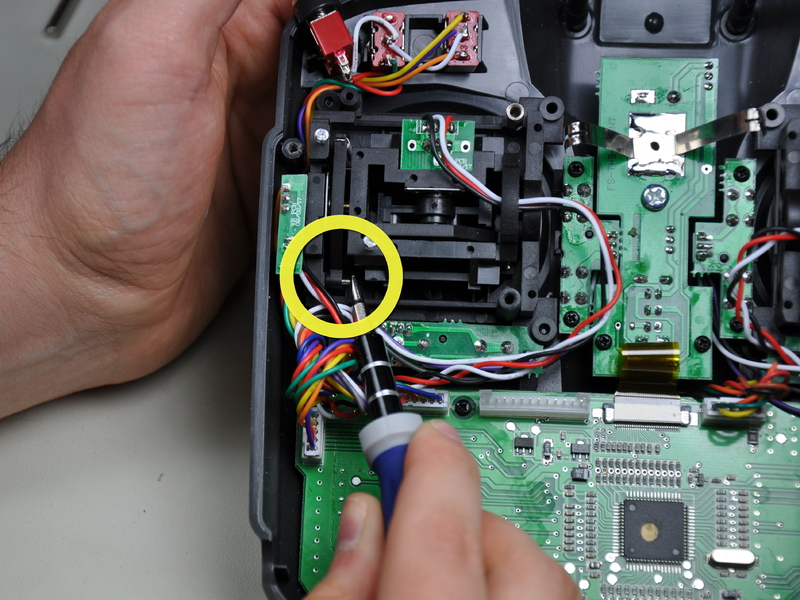
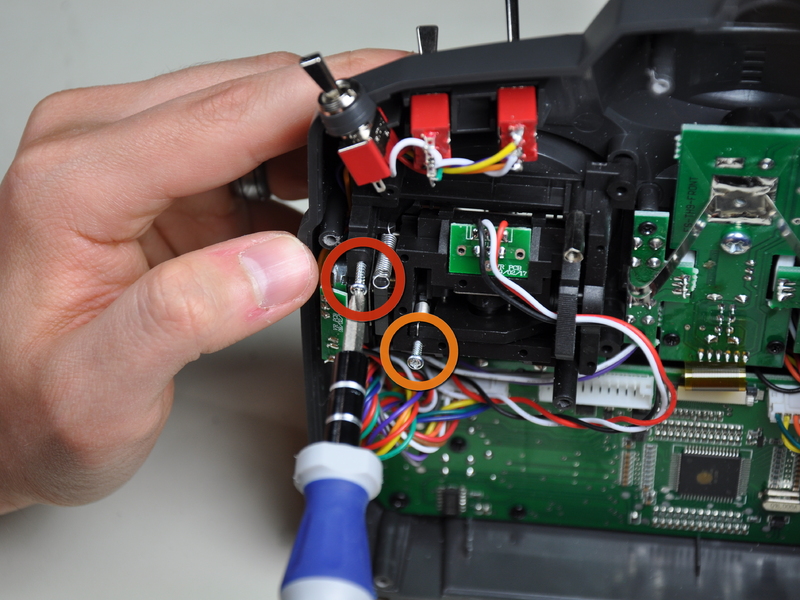







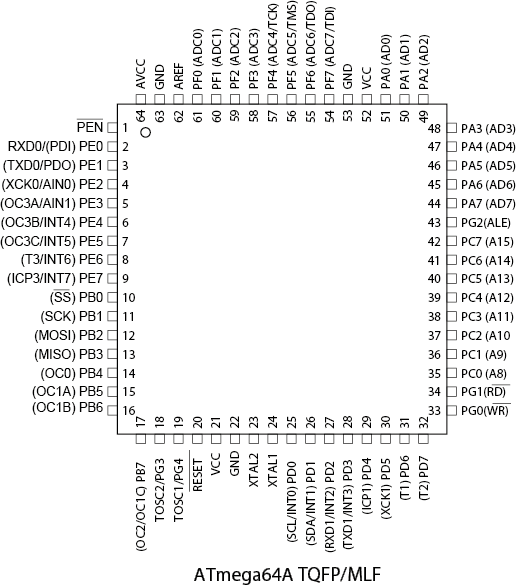

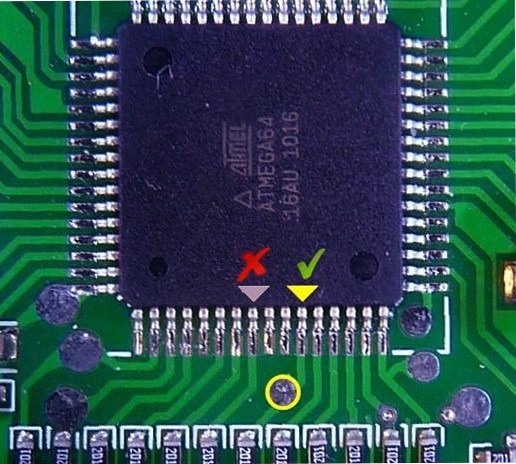
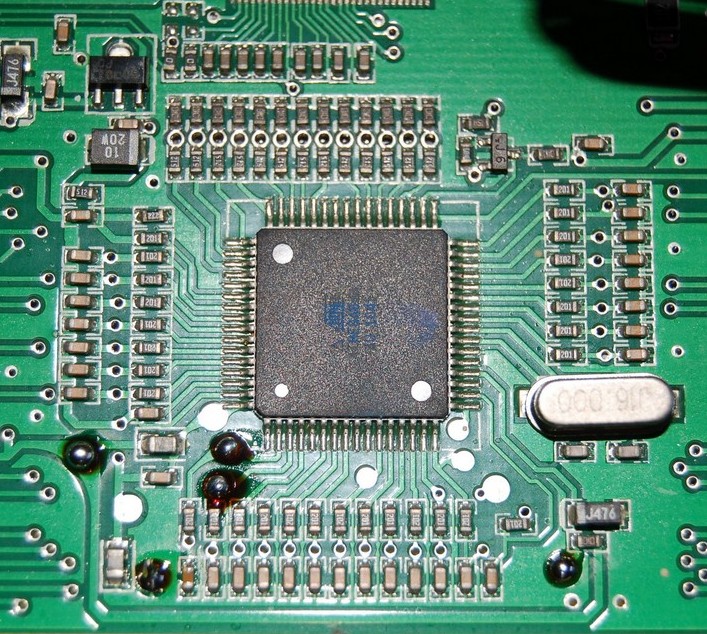

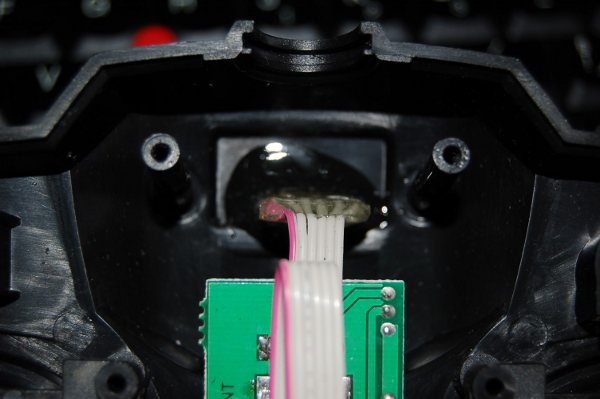

 Follow
Follow
































")































 a gélen")
")







































































