Quadkopter huzalozása
 Multikopterek hatalmas területet foglaltak modellezés világából. Bár, személyesen a klasszikus modellezést preferálom – balsa, reszelő, ragasztó, ezt a területet sem szeretném hanyagolni. Lényegében legó-modellezésnek tekintem, de ha repül, és kellemes és hasznos időtöltést szolgál, elfogadom.
Multikopterek hatalmas területet foglaltak modellezés világából. Bár, személyesen a klasszikus modellezést preferálom – balsa, reszelő, ragasztó, ezt a területet sem szeretném hanyagolni. Lényegében legó-modellezésnek tekintem, de ha repül, és kellemes és hasznos időtöltést szolgál, elfogadom.
Multikopterek manapság előregyártott alkatrészekből épülnek fel: motorok, motorszabályzók (Electronic Speed Controller, ESC), repülésfelügyelő egység (Flight Controler, FC), test (általában üvegszál- vagy szénszál-kompozit), vevőegység (RX), akkumulátor (BAT) és pár kiegészítő elem: kamera, videó adó (vTX), szonár, LED. Az egész szerkezet agyát az FC képezi, és mivel igen magasan integrált számítástechnikai eszközről van szó, ennek az eszköznek az otthoni gyártása szinte lehetetlen, ezért számos gyártó cég versenybe szált a modellezők kegyeit keresve. Minden szenzor és kiegészítő eszköz ezen a miniatűr számítógépen keresztül kapcsolódik az egész rendszerhez. Belátható, hogy számos csatlakozási pont lesz rajta parányi területen, és mivel számos eszköz csatlakozik hozza, más-más igényt is támasztanak a központi egység felé történő kommunikáció iránt. Ezen kis jegyzeten keresztül próbálok egy kis segítséget nyújtani, hogyan is szükséges kezelni ezeket MatekSys termékein keresztül (nem a legjobb termékek, de megbízható minőséggel és jó dokumentációval szolgál).
Áramellátás. Ahogy említettem, minden út az FC-hez vezet, kivéve egyes mellékutakat. A régebbi modelleknél a fő akkumulátor feszültség mellett, mindig ott szerepelt az 4,8-6V tartomány (4x 1,2-1,5v) a szervók és rádióvevő egységek számára. Hasonló a helyzet most is, csak a BEC-ek (Battery Eliminator Circuit – elem helyettesítő áramkör) megjelenésével a szabvány inkább 5V, ritkábban 6V lett. Ez a feszültség teljesen megfelel a mostani mikroelektronikának, azonban helyenként szükség van 3,3V (kamera) illetve 10 vagy 12V-ra is (videóadó). Annak érdekében, hogy kevesebb hő és zajterhelés érje a logikai rendszert, általában PDB-nek (Power Distribution Board) nevezett lapkán vannak szerelve az átalakítók, illetve a csatlakozási felületek a motorszabályzók számára. A PDB-k fontos feladata még pillanatnyi fogyasztás mérése (A). Ilyen például a MatekSys FCHUB-6S terméke, mely 9-27V feszültségforrásból 5 és 10V feszültséget állít elő a rendszer számára, ill., 184A értékig mér pillanatnyi fogyasztást a bemenő ágon (fekete, piros – áramellátás, kék, sárga – kommunikációs jelek).

Magának az FC-nek 5V-ra van szüksége, és tartalmaz 3,3V feszültségátalakítót alacsony-feszültségű eszközei számára. Matek termékek sajátossága, hogy egymással szalagkábellel is összeköthetőek, azonban forrasztási pontok is ki vannak alakítva az alaplapon, ami kellő szabadságot ad végső kialakításhoz.
Természetesen léteznek AIO (All-In-One) verziók is. Ilyen pl., a MateSys FC F405-CTR vagy a F411-ONE. Az utóbbi, ráadásul, a rádióvevő egységet is tartalmazza. PDB hiányában, a repülésvezérlőnket BEC forrásból is táplálhatjuk, nem fog megharagudni. Egyes videóadókon szintén találhatunk 5V kimenetet, de teljesítménye alacsony, így csak kamerák ellátására elegendő csak. Összesítve: a rendszerünkben több feszültségforrást is használhatunk. Nagy áramokat (ESC, vTX) vezérlő egységekből származó feszültségforrások gyakran zajosak, érdemes szűrni kondenzátor ill., ferromágneses gyűrű alkalmazásával, személyesen UBEC használatát javasolnám, azonban ha PDBvel integrált FC-nk van, nincs más dolgunk, csak rákötjük az akkumulátor feszültségét ( vBAT, BAT+, BAT-) a megfelelő forrasztási pontokra.

Motorvezérlő (ESC). Ahogy az előző ábrákon is látszik, motorszabályzók lehetnek különállók, vagy 4in1 kivitelben, vagyis 4 ESC egy lapon szerelve. A közös bennük, hogy a tápfeszültséget az akkumulátorról kapják, a jelet pedig az FC-ről közvetlenül vagy a PDB-n keresztül s1-s6 tüskéken keresztül (quadkopter esetén s1-s4). Egyes ESC-k tartalmaznak BEC-et is, vagyis akár motorszabályzóról is táplálható az FC.

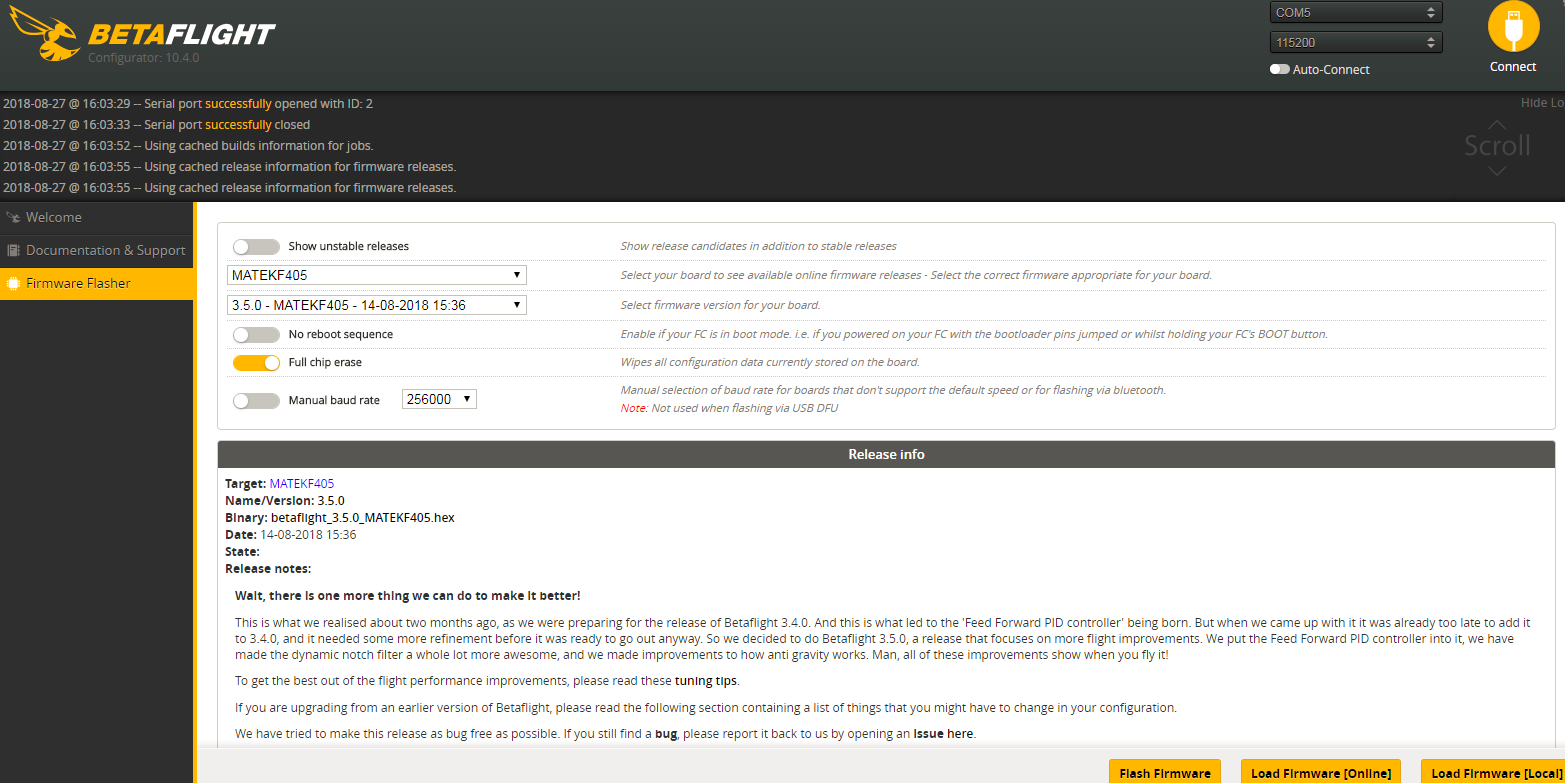
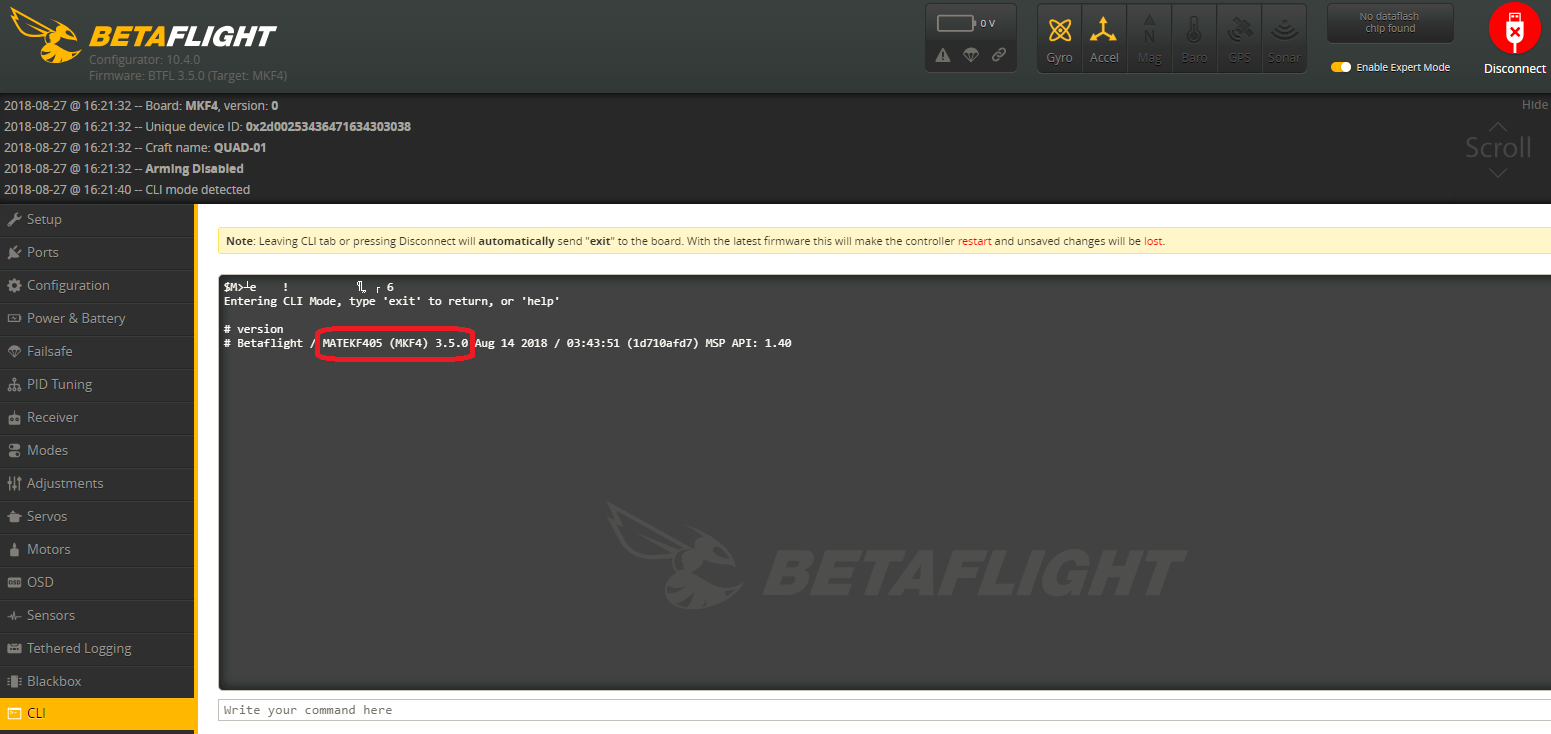
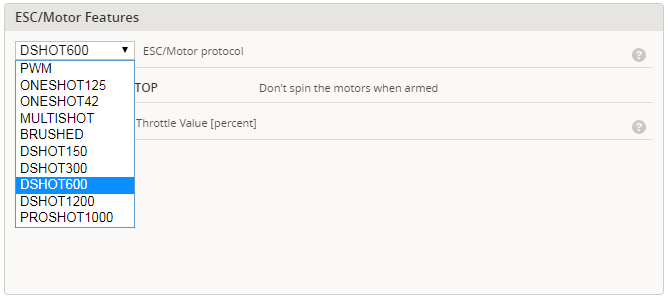
Mai motor-szabályzok számos firmware-rel készülnek (SimonK, blHeli-preferált), és számos kommunikációs protokollt támogatnak (PWM, OneShot, MultiShot, DShot), ezért fontos tisztában lenni, hogy egy adott ESC pontosan milyen “nyelve(ke)t” beszél. FC beállításoknál még szükségünk lesz rá. Szépsége a BetaFlight firmware-nek, hogy ESC programozóként használható, így, ha frissíteni vagy állítani szeretnénk a motor-szabályzókon, nem szükséges szétszedni a modellünket, elég csak összekötni a számítógépünket az FC-vel. Innentől BLHeli Suite hozzáférést kap az ESC-khez.


Egy ESC-n általában 4 + 3 forrasztási pont található. A 3 nagy pad a motorok csatlakozására szolgálnak. Itt megjegyezném, hogy bármely 2 vezeték felfecsérlése, motor forgásirányát vált. A másik oldalon 2 nagy forrasztó pad az áramellátás céljából van kialakítva, vagyis ide az akkumulátor feszültségét kötjük, általában PDB-ről. Középen két kisebb forraszpont a vezérjeleknek van fenntartva. Ezeken kapja az ESC az utasításokat az FC-től (PWM).
 4in1 kialakítás esetén ismétlődik a minta. Találunk rajta 4×3 forraszpontot motorjaink számára, illetve találunk rajta s1-s4, gnd forraszpontokat, vagy egy csatlakozót 5 vezetékkel bonthatóság érdekében. Legtöbb esetben van rajtuk árammérő egység is, és ezzel a vezetékek száma megnőhet 7-re. ezeken szolgáltatja az ESC a pillanatnyi áram és akkumulátor feszültség értékeket az FCnek (Curr, vBAT).
4in1 kialakítás esetén ismétlődik a minta. Találunk rajta 4×3 forraszpontot motorjaink számára, illetve találunk rajta s1-s4, gnd forraszpontokat, vagy egy csatlakozót 5 vezetékkel bonthatóság érdekében. Legtöbb esetben van rajtuk árammérő egység is, és ezzel a vezetékek száma megnőhet 7-re. ezeken szolgáltatja az ESC a pillanatnyi áram és akkumulátor feszültség értékeket az FCnek (Curr, vBAT).
Egy fontos megjegyzés: minden FC-nek megvannak a saját elvárásai azzal kapcsolatosan, hogy mely motor hol helyezkedik el, és mely irányba forog. Ügyeljünk arra, hogy a megfelelő ESC-t megfelelő vezérjellel látjuk el, es a motor megfelelő irányba forog. Az első teszteket légcsavarok nélkül, és kis cellux-al a tengelyen végezzük el!
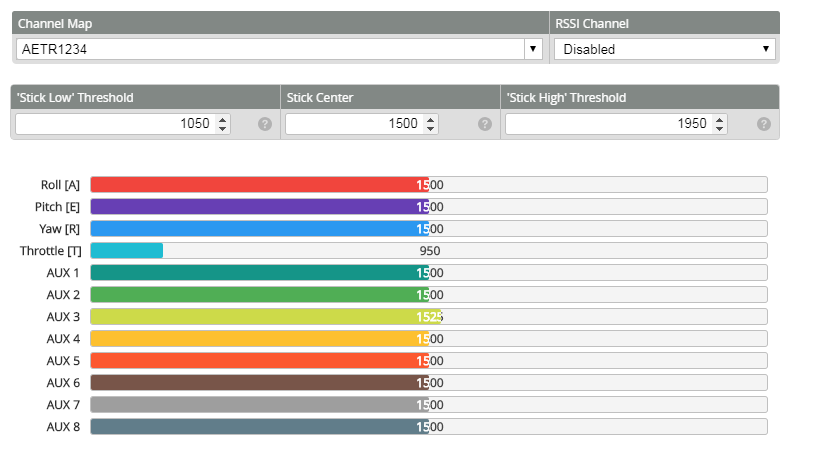
Rádióegység bekötése már kicsit kacifántos a sok kommunikációs protokoll (párhuzamos analóg: PWM, 1-1 vezeték csatornánként; soros analóg: PPM; soros digitális: S.BUS, I.BUS, Spektrum… ) miatt, ezért kezdjük mindig a használati útmutató letöltésével, annak tanulmányozásával, hogy megfelel-e a választott termék a követelményeinknek. Lássuk be, ez de még mindig nem űrtechnológia.
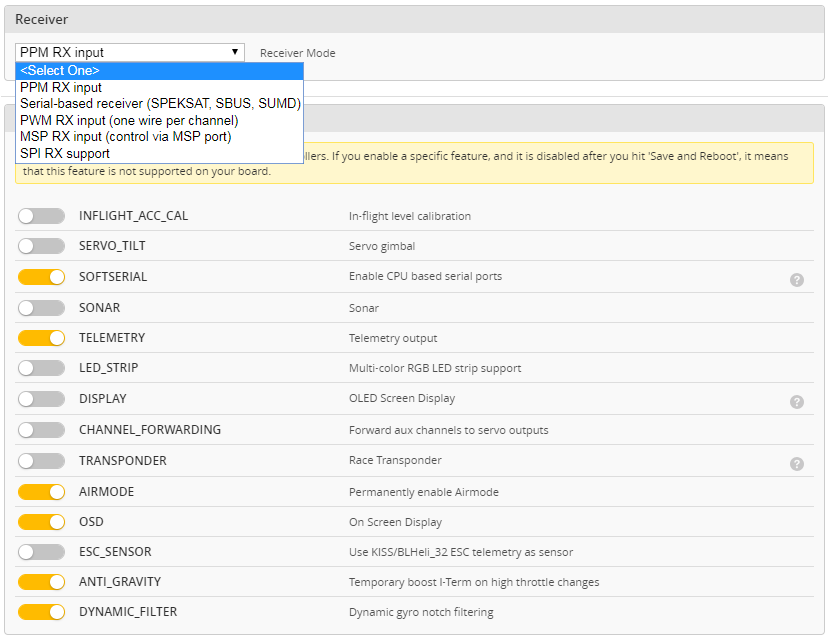
Analóg protokollok kikopni látszanak, az FC-ken általában külön csatlakozási felületet kapnak, míg a digitális soros jeleket UART (soros kommunikációs protokoll, [Rx,Tx,G,5v])interfészre kötjük (több is van az FCn 3-10), néha szabadon,néha dedikáltra. A bonyolítás ott folytatódik, a jel, amit az UART fogad normális, vagy invertált (jellemző F4 FC-kre). Spektrum vevők számára általában külön csatlakozót alakítanak ki vagy az RX mellett kialakítanak 3,3V feszültség forrást. (BetaFlight esetén az UART portnak meg kell mondjuk, hogy az serail, illetve a Receiver menüben, hogy milyen protokollon beszélünk majd vele, F4 FC esetén leeht, hogy aktiválnunk kell a Soft Serial megoldást, hogy boldoguljunk az invertált bemeneti jellel). Egyszerű ;).
 Follow
Follow