Technika fejlődésével együtt változik a repülő modellek világa is. Míg eleinte motor nélküli, később motorral ellátott szabadon repülő modellek szálltak a levegőben, későbbiekben zsinórral, huzallal irányították a modell magassági kormányát. Rá pár évvel később megjelentek az elektronikus analóg rádiók. És ahogy elérhető lett a digitális technika, az is kezdett beszivárogni a modellezés világában, utat nyitva a ma oly népszerű proporcinális rádió távirányítóknak. Lényegében, ha megnézzük a FAI modellkategóriákat, azonnal megtaláljuk ezen fejlődésnek a nyomát: F1 – szabadon-repülő, F2 – körrepülő, F3 – távirányítású modellek. Amilyen tempóval fejlődnek egyes modellezési ágak, nem tartom kizártnak, hogy hamarosan a FAI rendszerében megjelenne az UAV, az FPV és ki tudja még milyen automata és félautomata modell versenykategóriák.
Rádiótávirányítás történetéből
 Nem kell olyan messzire mennünk a múltba, hogy a távirányítás első gondolatát felkutassuk. Maga a gondolat és a megvalósítása nagyjából egyidős a telegráf hírtovábbító rendszerrel és a morze kód feltalálásával (1835). Gyakorlatban Nikola Tesla mutatta be elsőként nagy közönségnek az első távirányítású hajót New-York-i Madison Square Garden sportcsarnokban 1898-ban. Távirányítás körüli munkásságát Philadelphiai Franklin Intézetben tartott előadásával kezdődött 1893 tavaszán. Tesla ekkor foglalta össze a rádiótávközlés alapjait. 1895-ben St. Louis-ban megtartotta az első nyilvános bemutatóját távközlésből és 1896-ban már 48 km távolság sem jelentet akadályt. Azonban több évre volt szüksége a megfelelő alkotóelemek finomításához, melyek kellő stabilitást és távolságot tudtak biztosítani egy időben. Az első “RC merülő hajó” ki-be kapcsolható hajócsavar-motorral, oldal- és merülési kormánnyal volt szerelve. Mai szemmel szerény de akkori felszereltséggel igen nehezen kivitelezhető volt.
Nem kell olyan messzire mennünk a múltba, hogy a távirányítás első gondolatát felkutassuk. Maga a gondolat és a megvalósítása nagyjából egyidős a telegráf hírtovábbító rendszerrel és a morze kód feltalálásával (1835). Gyakorlatban Nikola Tesla mutatta be elsőként nagy közönségnek az első távirányítású hajót New-York-i Madison Square Garden sportcsarnokban 1898-ban. Távirányítás körüli munkásságát Philadelphiai Franklin Intézetben tartott előadásával kezdődött 1893 tavaszán. Tesla ekkor foglalta össze a rádiótávközlés alapjait. 1895-ben St. Louis-ban megtartotta az első nyilvános bemutatóját távközlésből és 1896-ban már 48 km távolság sem jelentet akadályt. Azonban több évre volt szüksége a megfelelő alkotóelemek finomításához, melyek kellő stabilitást és távolságot tudtak biztosítani egy időben. Az első “RC merülő hajó” ki-be kapcsolható hajócsavar-motorral, oldal- és merülési kormánnyal volt szerelve. Mai szemmel szerény de akkori felszereltséggel igen nehezen kivitelezhető volt.
 Erre a célra Tesla feltalált egy újfajta kohérer (a rádió-aktivált kapcsoló), lényegében egy tartály fém-oxid porral. A por elektromágneses mező jelenlétében úgy orientálódott, hogy megnőtt a vezetőképessége. Ha a tartályt átfordult, a por visszanyerte véletlenszerű, nemvezető állapotát. Tesla megoldotta azt is, hogy bizonyos dolgok egyszerre következzenek be egy “programozott” fogaskerekek, karok és motorok rendszere segítségével. Így a kohérer átfordulása után egy következő együttállást lehetett előhívni. Mark Twain, korán felismerte a találmány negatív oldalát is, hogy hamarosan a távirányítást harcaszati céllal is elkezdik használni. Már az 1930 években a szovjet oldalon megjelentek a “teletankok”, Angliában pedig a “Queen Bee” és a “Queen Wasp” rádió távirányítású repülők.
Erre a célra Tesla feltalált egy újfajta kohérer (a rádió-aktivált kapcsoló), lényegében egy tartály fém-oxid porral. A por elektromágneses mező jelenlétében úgy orientálódott, hogy megnőtt a vezetőképessége. Ha a tartályt átfordult, a por visszanyerte véletlenszerű, nemvezető állapotát. Tesla megoldotta azt is, hogy bizonyos dolgok egyszerre következzenek be egy “programozott” fogaskerekek, karok és motorok rendszere segítségével. Így a kohérer átfordulása után egy következő együttállást lehetett előhívni. Mark Twain, korán felismerte a találmány negatív oldalát is, hogy hamarosan a távirányítást harcaszati céllal is elkezdik használni. Már az 1930 években a szovjet oldalon megjelentek a “teletankok”, Angliában pedig a “Queen Bee” és a “Queen Wasp” rádió távirányítású repülők.
Első rádió-távirányítású modellek
Első RC modellekkel valamikor 1950. évek elején kezdtek el foglalkozni a modellezők. Első távirányítók rádióamatőr körökből indultak el, és eleinte saját építésű, megbízhatatlan és nehéz hangfrekvenciás LC oszcillátorok voltak. A kapcsolók, botok különböző értékű kondenzátorokat kapcsolását végezték a rezgőkörbe. Így a rádió eltérő frekvenciájú jelek kibocsátására volt alkalmas. A vevő egység pedig fogadta a jeleket és megfelelő szűrők segítségével a jelek megfelelő áramköri ágba voltak terelve. Későbbiekben elindult egyes komponensek sorozatgyártása, megjelentek a földi adó és vevő egységek a gyártók kínálatában. Ezek a korai rendszerek változatlanul szuper-regeneratív áramkörökkel működtek, amelyek zavarták egymást, ha egy adott távolságon belül volt a két jeladó. Érdekesség-képpen érdemes megemlíteni, hogy az adók az elején miniatűr rádiócsövekkel működtek és táplálásukhoz egy 1,5V és egy 90V feszültségű forrást igényeltek.
Ahogy fejlődött a technika, egyre kisebb, egyre könnyebb lett a felszerelés, megjelentek a többcsatornás rendszerek, elkezdték használni az oszcillálást stabilizáló frekvencia-kvarckavicsokat. Tranzisztorok megjelenésével az RC világába beköszöntek a szuper-heterodin rádiórendszerek. Ezzel jelentősen lecsökkent a szomszédos rádiók egymásra gyakorolt hatása.
Manapság ha új távirányítót szeretne venni az ember igen sok dolgot kell odafigyelni: ár, funkciók, ergonómia, stb. Ami viszont a legfontosabb, hogy a kornak megfelelő megbízható rendszert használjunk, ami zökkenőmentesebbé teszi a kedvenc időtöltésünket. De legyen bármilyen is a rádió, elektromos jelet mechanikus elmozdulássá kell alakítani, ezért a távirányítással kapcsolatos témát az információs lánc végéről kezdeném.
Szervó
Felépítésében viszonylag egyszerű szerkezet, mely egy nyáklapból, rajta vezérlő elektronikával, egy egyenáramú motorból, fogaskerekekből áll, melyek egy csinos kis dobozba vannak zárva. Az erőátviteli lánc utolsó fogaskerekének a tengelye ki van vezetve a dobozból. Erre kerül majd csatlakoztatásra szervókar és arra tolórudak. Ugyanennek a fogaskeréknek az alsó része pedig egy potméterhez van erősítve, hogy visszajelzést tudjon adni a vezérlő elektronikának (egy korábbi jegyzet: Motor- és hajtásvezérlés alapelve). A fogaskerekek anyagukban eltérnek tervezett terhelések függvényeben. Leggyakrabban poliamid vagy egyéb műanyag-fogaskerekű szervákkal találkozunk, de készülhetnek fémből, karbonból és az extrém terheléseknek kitett szervók akár titánból is. Nagyobb terhelésre szánt szervók utolsó fogaskerekét egy vagy két csapággyal is alá szokták támasztani.
Táplálás illetve parancstovábbítás céljából 3 vezeték van kivezetve a szervóból: test, táp és vezérjeljel. Sajnos a vezetékek színezése, sorrendje és csatlakozója gyártóként változhat. Modellezésben alkalmazott szervók táplálása általában 4,8-7,2V feszültséggel folyik.
 Fontos megjegyezni, hogy minél magasabb a feszültség, annál nagyobb nyomatékot fejt ki a szervó, de ezzel csökken az élettartalma is, – érdemes a gyártó által ajánlott értékeken belül üzemeltetni. A harmadik vezeték jeltovábbítás céljából lett kivezetve és általában 5V feszültségű PWM jelekkel közöljük a szervóval, mekkora szögben térítse ki az a kart.
Fontos megjegyezni, hogy minél magasabb a feszültség, annál nagyobb nyomatékot fejt ki a szervó, de ezzel csökken az élettartalma is, – érdemes a gyártó által ajánlott értékeken belül üzemeltetni. A harmadik vezeték jeltovábbítás céljából lett kivezetve és általában 5V feszültségű PWM jelekkel közöljük a szervóval, mekkora szögben térítse ki az a kart.
Pulse Width Modulation – impulzusszélesség szervó vezérlés
 Impulzusszélesség vezérlés magáról beszél: az információtovábbítást egy jel szélességének változtatásával érjük el. A modellezésben használt szervomotorok vezérlése 50 herzes, vagyis 20ms hosszúságú keretben zárt jelekkel vezéreljük. A keretben levő 1500 μs (1,5ms) hosszúságú jel középállásba kényszeríti a szervó karját. A gyártók eltérő mozgásterű szervót gyártanak. Leggyakrabban használtak -60 és 60° között mozognak, és általában 1000-2000 μs jelszélességet igényelnek. Vannak nagyobb mozgásterű szervók is, így például futóműmozgató szervók általában 180° azaz ±90°-ra képesek elfordulni a középállástól számítva. Ezeknél vagy a visszajelzést biztosító potmétert, vagy az alkalmazható jelszélességet tartományát szélesítik, így a vezérjel 650 és 2350 μs hosszú lehet. Robotikában előfordulnak 360°-os vagy korlátozás nélküli szervók is, melyeknél pozíciómeghatározására enkodert használnak.
Impulzusszélesség vezérlés magáról beszél: az információtovábbítást egy jel szélességének változtatásával érjük el. A modellezésben használt szervomotorok vezérlése 50 herzes, vagyis 20ms hosszúságú keretben zárt jelekkel vezéreljük. A keretben levő 1500 μs (1,5ms) hosszúságú jel középállásba kényszeríti a szervó karját. A gyártók eltérő mozgásterű szervót gyártanak. Leggyakrabban használtak -60 és 60° között mozognak, és általában 1000-2000 μs jelszélességet igényelnek. Vannak nagyobb mozgásterű szervók is, így például futóműmozgató szervók általában 180° azaz ±90°-ra képesek elfordulni a középállástól számítva. Ezeknél vagy a visszajelzést biztosító potmétert, vagy az alkalmazható jelszélességet tartományát szélesítik, így a vezérjel 650 és 2350 μs hosszú lehet. Robotikában előfordulnak 360°-os vagy korlátozás nélküli szervók is, melyeknél pozíciómeghatározására enkodert használnak.
Az analóg módon működő szervók számára nem elegendő egyszer kiadni az impulzust, mert lehet, hogy szervókar még nem éri el a végső pozícióját. Azonkívül a jel nélkül a feszültségátalakító nem táplálja a motort, így nem keletkezik nyomaték a karon, “ernyed” a szervó. Digitális szervók esetében egy jel kiküldése elegendő, mert a beépített mikrokontroll gondoskodik a végső pozíció eléréséről, utána, jel hiányában azonban a digitális szervó is “ernyed”. A digitális szervót ezenkívül eltérő válaszreakcióra is programozhatjuk, amivel optimalizálhatjuk bizonyos feladatokhoz. Vezérfrekvencia terén a szervók elég rugalmasak. Analóg verziók 30-60 Hz-en, digitális példányokat pedig akár 300 Hz-en is vezérelhetjük. Ha kissé terheljük egy analóg szervó karját, halhatjuk a “cicergést”, mely a jelmentes és aktív szakok váltakozásából adódik. A szervók elektronika úgy van kialakítva, hogy meg tudja határozni, a vezérjelnek megfelelő pozícióban tartózkodik-e a kar, és ha nem, akkor melyik irányba kell elmozdulnia. A szervókar tengelyére kötött potméter a kar elfordulásáról nyújt visszajelzést az elektronika felé. Az elektronika pedig gondoskodik a motor megfelelő irányú elmosdatásáról, ha az nincs a beérkező jel szerinti helyen. Korábban a gyártók készítettek jobb és bal elfordulású szervókat arra az esetre, ha a távirányító pozitív kar elmozdulásra a szervó nem a szükséges irányba térne ki. Ezeket a szervókat általában eltérő színű matricával jelölték. Komputeres távirányítók megjelenésével ez az igény megszűnt, mert az irányváltást már a rádión el tudjuk végezni.
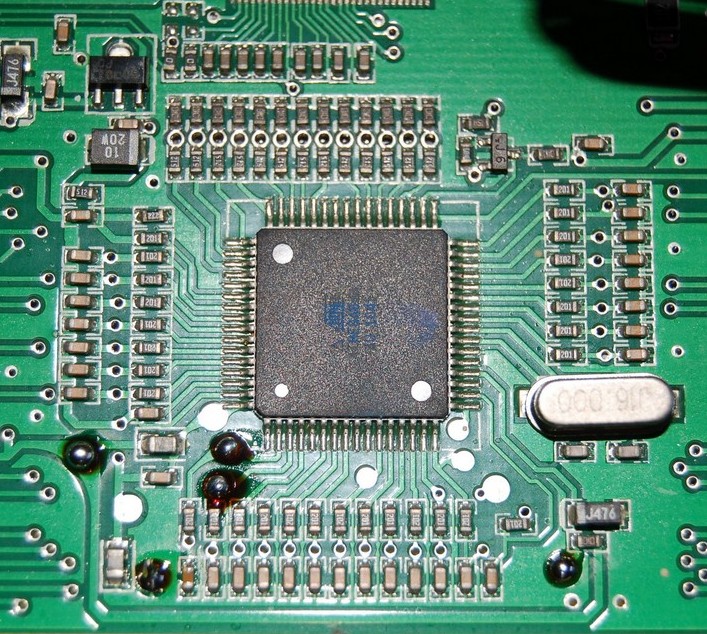
Vevő egység
RC vevők a méretükhöz képest igen fontos és feladatai közé tartozik a távirányító jelének detektálása, zajmentesítése, jelerősítése és dekódolása. Jel azonosítása tűnhet a legegyszerűbbnek, de ha jobban belegondolunk, a levegőben számtalan eltérő frekvenciájú és erősségű jelek hasítják az étert. Ebben a rengetegben megbízhatóan és egyértelműen megtalálni azt a jelet, ami a társ távirányítóból származik nem egyszerű feladat, ráadásul előfordulhat, hogy a szomszédban erősebb rádió is ad, vagy valaki más is használja az általunk frekvenciát. Ezért a gyártók féltve őrzik megoldásaik részleteit. A mai adóegységek teljesítménye törvényileg van szabályozva és nem haladhatja meg a 100mW-ot. Azonban közel hasonló elektronikai kialakítás mellett a vevőegységek teljesítménye jelentősen eltérhet. Magasan integrált mikrosémáknak köszönhetően ez a nagy “tudás” elfér egy 3-10 grammos egységben.
Ha egyszer a jelet megtalálta a vevő egység, a jel zajmentesítése után fel van erősítve a dekóder bemeneti jel szintjére. A dekóder feladata azonosítani a jelsorozat részeit, megtalálni a szinkron jelet (általában a leghosszabb jel a sorozatban) és szétosztani az egyes csatornák jeleit a megfelelő csatlakozókra, melyekre szervók, fordulatszabályzók, kapcsolók vagy egyéb elektronika lehet kötve. Általában az 1. csatornán a magassági, 2. – csűrő, 3. -tolóerő/féklap, 4. – oldalkormány és stb. A csatornainformációkat a távirányító rendszeresen frissíti, legalább 50 alkalommal másodpercenként. A csatornakiosztás változhat gyártóként, de lehet szabadon állítható is.
Vevőegységhez tartozik meg egy rugalmas antenna is. Gigahertzes vivőhullám esetén az antenna hossza centiméterben mérhető (2,4GHz – 12cm, 5,8GHz – 5cm). Megahertzes hullámok esetén a hullám hosszát méterekben mérik (75MHz – 4m, 50MHz – 6m, 35MHz – 8,5m), ezért a modellekhez ¼ hullámhosszal megegyező hosszúságú antennát használnak vagy elektromosan hosszabbítják. Mivel hangolt antennáról van szó, se rövidíteni, se hosszabbítani, sem feltekerni nem ajánlott. Módosítások hatása komoly mérőműszerek nélkül nem határozható meg, de valószínű, hogy a hatékonyság, és ezzel a hótótáv is csökken. Antenna vezetésénél tartsuk távol fém és szénszálas szerkezeti elemektől, elektromos motoroktól (pl. szervó) és egyéb elektromos zaj forrásaitól. Jó megoldásnak minősül, ha a vevő egység közelében kivezetjük a gép törzséből és a törzs külső felülete mentés vezetjük, vagy kifeszítjük a pilótafülke és függőleges stabilizátor között.
Az RC távirányítás fejlődése során több kommunikáció szabvány is látott világot. Ezekből számos egyidejűleg létezik és szolgálja a modellezni vágyókat. Ezekből csak két irányzatot szeretnék kiragadni és röviden bemutatni. Az egyik az a kristállyal beállított szuper-heterodin rádiók. Fő tulajdonságuk, hogy egy bizonyos frekvenciatartományra gyártott, pontosabban beállított adó és vevő páros pontos hangolását egy kvarc kristály segítségével végzik. Minden modellezésre kijelölt tartomány csatornákra van osztva. A csatornák számozva vannak ezért a kristályokon fel van tüntetve a csatornaszám, a rezgési frekvencia, és az is, hogy egy adó (TX), vagy vevő (RX) egység számára gyártott kristályról van szó (technológiából kifolyólag az adó és a vevő kristályai eltérnek, így nem cserélhetők fel). A kristály belső felépítése miatt igen érzékeny az ütésre és a vibrációra – könnyedén sérül a belső szerkezete. Ezért célszerű fokozatos figyelmet szentelni a vevő egység mechanikus behatások szembeni védelmére. Mivel egyszerre csak csak egy páros lehetett egy csatornán belül, így a csatornaegyeztetés és a csatornakiosztás egyik főfeladat volt repítés kezdete előtt. Szintézeres rádiók megjelenésével megszűnt kristályok kezeléséből adódó nehézség, hiszen kis csavarhúzóval pillanatok alatt be lehetett állítani a használt frekvenciatartomány kívánt csatornáját, természetesen csak egyeztetés után. Korlátozott csatornaszám miatt népes rendezvények esetében szigorúan követni kellett az utasításokat és a házirendet, hogy két azonos csatornán működtetett rádió ne szóljon, és ne hallgasson.
Igazi megváltást a 2.4 GHz tartományban működő frekvenciaváltós rádiók hozták. Ezek esetében a rádió adót és vevőt “be kell mutatni egymásnak”. Ezt a folyamatot bindelésnek nevezik. Ismerkedés után a vevő egység csak a saját adója adatcsomagjait fogadja el. Ezen típusú rendszerek másik előnye, hogy üzemeltetés során egyedül megkeresi a legkevésbé zajos csatornát és azon kommunikál a vevővel. Kristály hiánya miatt kicsi és nem érzékeny a vibrációra. Ezen technológia számos lehetőséget nyújt és ezért több szabvány is jelent meg. Részletesebben ezekről majd egy külön jegyzetben.
Legyen szó autó, repülő, helikopter vagy egyéb modelltípusról, a távirányítás és bizonyos szabályzás elektromos megoldásait preferáljuk, kedvezőbb méretük, hatékonyságuk és súlyuk miatt, pár szót szükségeltetik ejteni az áramellátás lehetőségeiről.
Rádió adó egység, vagy ahogy szoktuk becézni, a távirányító fő feladata a karok, kapcsolók állapotát rendszeresen felmérje, elemezze ezeket és ennek megfelelően állítson elő egy olyan jelet (PPM avagy PCM) mely megfelelően modulálva átküldhető a repülő szerkezetünkre.
Elektromos áram forrásai
Pb – ólom-savas akkumulátorok nagy múltra tekintenek vissza: felfedezésüket 1859-re datálják. Ugyanebben az évben felfedezték a széncink elemeket és a NiCd akkumulátorokat, de mivel olcsó és egyszerű volt az előállításuk, alacsony energiasűrűségük ellenére (40-50Wh/kg) még mindig használják őket széles körben. Töltésük egyszerű, feszültségkorlatos, tárolásukat teljesen feltöltött állapotban végezzük éves tornáztatással (lemerít-feltölt) vagy cséptöltés mellett, néha töltött száraz állapotban. Alacsony energiasűrűségük miatt a modellezésben földi állomások és berendezések energiaellátására használhatók. Nehézfémtartalmuk miatt elhasznált elemeket elhelyezése csak erre szakosodott gyűjtőhelyeken engedélyezett!
Alkáli elemek – egyszer használatos 1,5V feszültségű elem. Általában kis teljesítményű RC játékokban használják. Üzemeltetés során nem alkalmasak hirtelen nagy ampereket leadni – maximumuk 0,2C környékén van,– energiatárolásuk viszonylag magas: 3-4000mAh. Eldobhatóságuk miatt drága megoldásnak minősül mind környezetvédelmi, mind anyagi szempontból.
NiCd – nikkel-kadmium (nikad-nak szokták ejteni) újratölthető elemek, melyekkel kiválthatjuk az alkáli elemeket (AAA, AA, C, D). Ugyan a NiCd cellák csak 1,2V előállítására képesek, azonban több-százszor tölthetőek, akar névleges kapacitásuk hússzorosát is képesek leadni (20C) és olcsók. Hátrányuk a töltés memória és viszonylag nagy önkisütési ráta, hosszabb tárolás után célszerű újraformázni. Töltés előtt ajánlott az akkumulátort kisütni (lemeríteni 0,5V alá). Töltésük során a következő áramértékek betartása maximalizálják a NiCd cella élettartalmát: töltés 0,1-0,2C -vel, a töltés utáni csepptöltés 0,05C. Jó választás lehet RC autók és hajók motorjainak, illetve repülők vevőegységeinek táplálása számára. Elhasznált/régi elemek háztartási hulladékgyűjtőbe dobni tilos!
NiMH – nikkel-metál-hidrid elemek tulajdonságuk jobbak, mint NiCd elemeké: könnyebbek, tovább tartják a töltésüket, de elődjeiket nagyobb csúcsáram jellemzi(15A vagy 8C fölött inkább NiCd akkumulátort használjunk). Sanyo Eneloop és GP ReCyko+ különösen jó energiatárolási tulajdonságokkal bírnak. Használat során egy kis odafigyelést igényelnek, “mert nem szeretik” a teljes lemerítést. Sajnos nincs semmi ingyen, minél kisebb a belső ellenállása az akkumulátornak, annál nagy áramot képes leadni, annál többet kell foglalkozni vele tárolás során. Ez lényegében annyit jelent, hogy tárolásukat félig feltöltött állapotban kell végezni és kb. 2-3 hetente le kell meríteni őket nagy árammal 0,9V-ig, és újratölteni 50%-ra. Kisebb súlyuk miatt alkalmazhatóak repülőgépmotorok táplálására, de legjobb alkalmazási területük az RC autók világa illetve készíthetünk vevő akkupakkokat (elérhetik a 100-110Wh/kg).
LiPo – lítium-polimer akkumulátorok nagy népszerűségnek örvendenek RC repülő- és helikopter-modellezők körében. LiPo cellák nagyon könnyűek a többi típushoz képest, akár 500 újratöltési ciklust is képesek elviselni, 3,7 V állítanak elő cellánként és rövid távon 100-200A leadására is képesek (75-100C, 3000W/kg). De figyelni kell a gyártó által előírt értékekre, mert nehezen viselik a túlterhelést és a túlmelegedést. Használat során a cellák feszültsége ne menjen 3,0V alá, egyéb esetben cellák épsége nem garantált, különösen, ha alacsony feszültségük tartós. Többcellás pakkok esetében használat előtt a cellák feszültségét azonos értékre állítsuk, a töltésüket pedig csak speciálisan kifejlesztett mikrokontroller-vezérelt balanszer töltővel végezzük (energiatárolásuk akár 300Wh/kg). Tárolás szempontjából igénytelenek, bár egyes források alacsony hőmérsékletet ajánlanak. Félévente érdemes ellenőrizni a feszültségüket és igény szerint feltölteni a cellákat 3,8V-ig. Korábbi cellák potenciális gyúlékonyságuk miatt lettek hírhettek, azonban a forgalomba található LiPo-k már stabilak, és odafigyeléssel sokáig szolgálnak bennünket. Röviden összefoglalva – mimóza lelkű óriások, – tartsuk őket szűk feszültségi tartományon belül (3,0-4,2V per cella).
LiIon –
LiFe – lítium-ferrit-polimer ferrit akkumulátorok sokban hasonlítanak a LiPo társaihoz, azonban üzemi feszültségük alacsonyabb – 3,3V ezért a töltési maximum feszültségük is 3,6V! Névleges energiatárolási képességük 1700Wh/kg.
A123 – lítium-ion-fosfát akkumulátorok, melyek hasonló tulajdonságokkal rendelkeznek, mint a LiFe akkumulátorok, azonban nehezebbek, nagyobbak de nagyobb árammal tölthetőek, ami drasztikusan lecsökkenti az akkumulátorok töltési idejét. Tárol energiasűrűségük nagyobb, elérheti a 240Wh/kg és az újabb fejlesztésű cellák akár 100C nagyságrendű áramot is képesek leadni rövid időn belül.
BEC – áramforrások elektronikus megoldása, mely magasabb feszültségű akkumulátorokra kötve előállítja a szükséges 5V feszültséget. Általában 3-5A folytonos áram leadására képesek, ami kielégíti a közepes méretű modellgépek igényeit.

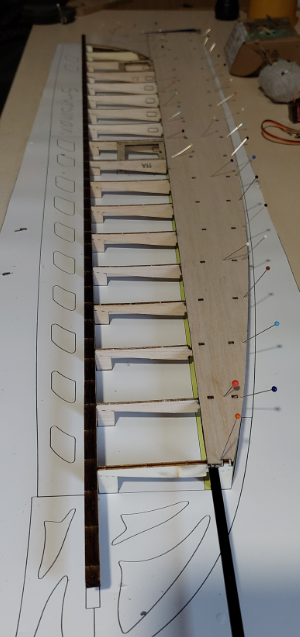
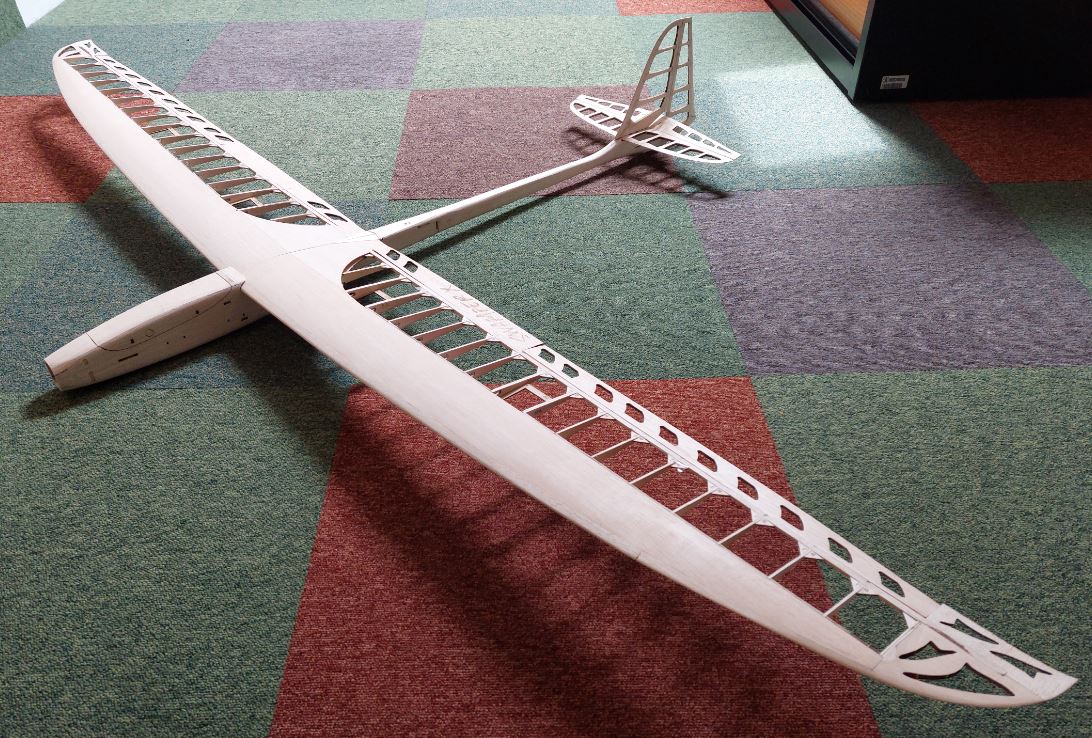
 Az alkatrészeket egy fadobozban kapjuk, ami nemcsak védi, de az előre perforált lemezekből később egy tartót tudunk összerakni, hogy a gépet esetleg ne a párás fűbe kelljen lerakni és a súlypont beállítását is segíti. A teljes kit tartalmazza fa alkatrészeket, szén farokcsövet, tolórudakat és szerelékeket, valamint egy szilikonos felületű nyomtatott építősablont. Ezen nagyon egyszerű a ragasztás.
Az alkatrészeket egy fadobozban kapjuk, ami nemcsak védi, de az előre perforált lemezekből később egy tartót tudunk összerakni, hogy a gépet esetleg ne a párás fűbe kelljen lerakni és a súlypont beállítását is segíti. A teljes kit tartalmazza fa alkatrészeket, szén farokcsövet, tolórudakat és szerelékeket, valamint egy szilikonos felületű nyomtatott építősablont. Ezen nagyon egyszerű a ragasztás.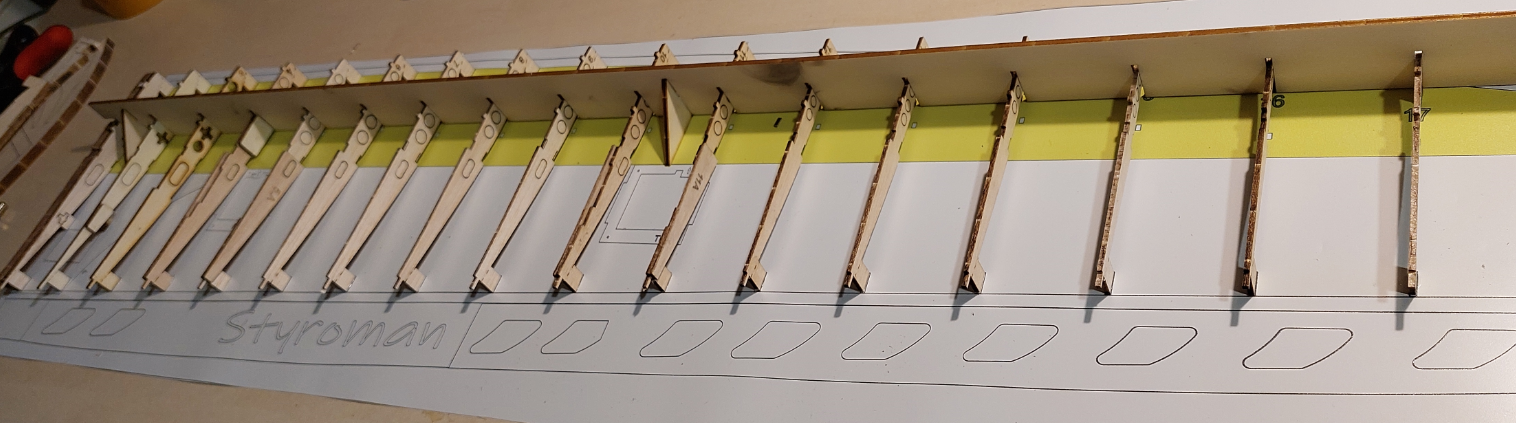 Az építést a szárnyal kezdtem. Az S4083 egy enyhén ívelt profil, ezért a pontosabb építés miatt a bordákat fejjel lefelé rögzítjük az építősablonra. A kis lábaikat egyszerűen a megfelelő téglalapokra ragasztjuk egy csepp pillanatragasztóval és egészen addig így dolgozunk, amíg a szárny alsó torziója felkerül. A bordák függőleges rögzítését egy rétegelt sablon is segíti.
Az építést a szárnyal kezdtem. Az S4083 egy enyhén ívelt profil, ezért a pontosabb építés miatt a bordákat fejjel lefelé rögzítjük az építősablonra. A kis lábaikat egyszerűen a megfelelő téglalapokra ragasztjuk egy csepp pillanatragasztóval és egészen addig így dolgozunk, amíg a szárny alsó torziója felkerül. A bordák függőleges rögzítését egy rétegelt sablon is segíti.



 Follow
Follow