A rádiós átvitel. A rádiós összeköttetéshez szükséges egy adókészülék, aminek jeleit az átvivendő információnak megfelelően moduláljuk, továbbá egy vevőkészülék, ami az adó üzeneteit képes feldolgozni. Az adó által előállított elektromágneses hullámok terjedése révén lehet az üzenetet nagy távolságra vezeték nélkül továbbítani. Az elektromágneses hullámokat váltakozó elektromos és mágneses terek alkotják: az elektromos teret az elkülönített töltött részecskék hozzák létre, vagyis a feszültség és a távolság határozza meg, a mágneses erőteret a mozgó töltött részecskék hozzák létre. Az áram csak feszültség hatására folyhat, vagyis mágneses erőtérhez mindig tartozik elektromos erőtér is, – tehát az áram elektromágneses erőteret hoz létre.

Az elektromágneses hullámok polarizációja. Az elektromágneses hullám polarizációját az elektromos komponensének iránya határozza meg (feszültség kelti). Két fő polarizációs módot különböztetünk meg: a lineáris és az elliptikus vagy kör alakú polarizációt. Az elliptikus polarizáció esetében az elektromos komponens iránya körmozgást végez. A körforgás irányától függően beszélünk jobbra vagy balra forgó kör-polarizációról. A rövidhullámú tartományban az elliptikus, vagyis a kör alakú polarizációnak alig van jelentősége. Az igen nagy frekvenciák tartományában azonban fokozódó mértékben alkalmazzák, különösen az űrkutatás területén (pl. rádióasztronómia).
A lineáris polarizáció esetében az elektromos erővonalak egyenesen futnak, és a
 földfelszínhez képest egy bizonyos irányt vesznek fel. A földfelszínhez felvett irányuktól függően megkülönböztetjük a horizontális, vagyis vízszintes polarizációt (az elektromos erővonalak a földfelszínnel párhuzamosak) és a vertikális, vagyis függőleges polarizációt (az elektromos erővonalak a földfelszínre merőlegesek).
földfelszínhez képest egy bizonyos irányt vesznek fel. A földfelszínhez felvett irányuktól függően megkülönböztetjük a horizontális, vagyis vízszintes polarizációt (az elektromos erővonalak a földfelszínnel párhuzamosak) és a vertikális, vagyis függőleges polarizációt (az elektromos erővonalak a földfelszínre merőlegesek).
Az ionoszféra egyenlőtlenségei következtében a rövidhullámú tartományban igen gyakori a polarizáció-változás. Ennek következtében létrejövő fadding-jelenségeket polarizációs fadding-nek nevezzük. A terjedés útjában levő akadályok szintén polarizáció-módosuláshoz vezethetne. A vízszintesen felépített antennák általában vízszintesen polarizált hullámokat sugároznak ki, a függőlegesen elrendezett antennák pedig általában függőlegesen polarizált hullámokat. Bizonyos antennatípusoknál azonban a polarizáció az antenna irányából nem ismerhető fel azonnal (így pl. a résantennánál és a Quad-antennánál). Az elliptikus polarizáció meghatározásához szintén nincsenek egyszerű, általános érvényű szabályok.
Reflexió, refrakció és diffrakció. A reflexió (visszaverődés) lehet irányított, amely síkfelületen alakul ki, vagy szórt reflexió, amely egyenlőtlen felületeken keletkezik. Az irányított reflexiónál a visszavert sugár, a beeső sugár és a beesés pontjára emelt merőleges egy síkba esnek. A beesési szög és a visszaverődési szög a beesés pontjára emelt merőlegeshez képest egyforma. A reflexió mértéke (a reflexiós koefficiens) függ a visszaverő közeg permittivitásától (dielektromos tényezőjétől és permeabilitásától, más szóval áteresztő képességétől).
Az elektromágneses hullámok refrakciója (törés) különböző dielektromos tényezőjű közegek átmeneténél lép fel. Ennek a jelenségnek különösen az ultrarövid hullámok terjedésénél van jelentősége. Mivel az elektromágneses hullámok terjedési sebessége a közeg dielektromos tényezőjétől függ, így ha ez változik, a terjedési sebesség is változik. A sebesség változás következtében pedig irányváltozás lép fel; ez a refrakció. A légkör dielektromos tényezője függ a sűrűségtől és relatív nedvességtartalmától. A jelenség igen szemléletesen mutatható be egy optikai kísérlettel: ha egy botot ferdén egy vödör vízbe helyezünk, akkor a bot a vízfelszín síkjában meghajlani látszik (a fény is elektromágneses hullám).
Az elektromágneses hullámok diffrakciója (elhajlása) a terjedés útjában levő élek mentén alakul ki. Ennek köszönhető, hogy olyan területeken, amelyek hullámárnyékban vannak, mint pl. magasabb hegyek és épületek mögött, sokszor még elfogadható vétellehetőség tapasztalható. A diffrakció mértéke frekvenciafüggő: növekvő frekvenciával csökken.
Az atmoszféra. Az elektromágneses hullámok terjedésében jelentős szerepe van a Föld légkörének, az atmoszférának. Az atmoszféra mintegy 2000…3000 km magasságig terjed, és főleg nitrogénből, oxigénből, szén-dioxidból és vízgőzből áll. Az atmoszférát három fő rétegre szokás osztani:
 A troposzféra. A Föld légkörének a földfelszíntől kb. 11 km magasságig terjedő szakaszát troposzférának nevezzük. Szokás még “időjárási rétegnek” is nevezni, minthogy az időjárást meghatározó meteorológiai folyamatok elsősorban itt zajlanak le. A troposzféra a légkör anyagának mintegy 75%-át tartalmazza. A troposzféra hőmérséklete a magassággal általában csökken: 1000 méterenként 6…8°C-kal. A hőmérséklet a legfelső rétegben, a tropopauzában a legkisebb, átlagosan -50 °C. A troposzféra és a sztratoszféra közötti átmeneti réteg, a tropopauza magassága ingadozó. Közép-Európa földrajzi szélességénél általában márciusban a legalacsonyabb, állagosan 9,7km, míg júliusban a legmagasabb: 11,1km. A troposzféra állapota az ultrarövid hullámok terjedését lényegesen befolyásolhatja.
A troposzféra. A Föld légkörének a földfelszíntől kb. 11 km magasságig terjedő szakaszát troposzférának nevezzük. Szokás még “időjárási rétegnek” is nevezni, minthogy az időjárást meghatározó meteorológiai folyamatok elsősorban itt zajlanak le. A troposzféra a légkör anyagának mintegy 75%-át tartalmazza. A troposzféra hőmérséklete a magassággal általában csökken: 1000 méterenként 6…8°C-kal. A hőmérséklet a legfelső rétegben, a tropopauzában a legkisebb, átlagosan -50 °C. A troposzféra és a sztratoszféra közötti átmeneti réteg, a tropopauza magassága ingadozó. Közép-Európa földrajzi szélességénél általában márciusban a legalacsonyabb, állagosan 9,7km, míg júliusban a legmagasabb: 11,1km. A troposzféra állapota az ultrarövid hullámok terjedését lényegesen befolyásolhatja.
A sztratoszféra. A Föld felszíne felett 11…80 km magasságban találjuk a sztratoszférát. Ebben a tartományban a szó általános értelmében vett időjárási jelenségek nem játszódnak le, és a réteget a vízgőz teljes hiánya jellemzi. Hőmérséklete mintegy 20 km magasságig állandónak tekinthető, e felett pedig egyenletesen növekszik, míg 50 km magasságban kb. 50 °C maximumot nem ér el. Ezt a növekvő hőmérsékletű tartományt ózon-zónának is nevezik, mivel ebben a magasságban a légkör ózon-koncentrációja viszonylag nagy. Ez az ózon-réteg a földi élet létének és fejlődésének fontos tényezője, minthogy a Nap ibolyántúli sugárzásának legnagyobb hányadát elnyeli.
50 km feletti magasságban a hőmérséklet-eloszlás ismét csökkenő jellegű, míg 80 km-nél – az ionoszférába való átmenetnél – ismét fordulópont található. A sztratoszféra hatását az ultrarövid hullámok terjedésére ez ideig nem sikerült kimutatni.
Az ionoszféra. 80 km feletti magasságban az ionoszféra található, amelynek felső határa hozzávetőleg 800 km-nél van; itt fokozatosan átmegy az interstelláris (csillagközi) térbe. Ezt az átmeneti tartományt exoszférának nevezik. Az ionoszférában igen sok elektromosan töltött részecske – ion és elektron – van. Ezek semleges gázmolekulákból ionizáció következtében jönnek létre. Mivel a gázsűrűség ilyen magasságon alacsony, ezért az ionizált állapot jelentős ideig fennmaradhat. A pozitív ionok és elektronok egymásra találását rekombinációnak hívják. Ionizációt itt elsősorban a napsugárzás okoz; az ultraibolya, korpuszkuláris sugárzás és a kozmikus sugárzás, továbbá a meteoritok zápora (több mint 100 meteorit/nap). Az elektromosan töltött részecskék jelenlétének következtében az atmoszféra felső rétege elektromosan vezetővé válik, és ilyenformán az elektromágneses hullámok bizonyos frekvenciatartományát képes visszaverni (reflektálni).
Kennelly és Heaviside már 1900-ban feltételeztek nagy magasságban egy ilyen elektromosan vezető réteget. Appleton és Barnett 1924-ben kísérleti úton kimutatták a Föld légkörének reflektáló tulajdonságát, s ezzel bizonyították Kennelly és Heaviside elméletét. Később a radar-elven alapuló mérésekkel sikerült kimutatni, hogy az atmoszférában nemcsak egy ilyen reflektáló tulajdonságú réteg található (Kennelly – Heaviside-réteg), hanem egy egész rétegrendszer.
Az ionoszféra elektronsűrűség-eloszlásának néhány maximuma van. 40 és 80 km közötti magasságban ezért több rétegre tagoljuk. Tulajdonképpen nem is beszélhetünk rétegekről, mivel a különböző elektronsűrűségű tartományok közötti átmenetek egymásba folynak. A réteges szerkezet elmélete azonban az elmúlt évtizedekben szilárd fogalommá vált, ezért használata továbbra is indokolt. Rétegek alakulása függ a naptól érkező energiától, ezért egyes rétegek csak nappal vannak jelen.
 Napközben, nagyjából 50-90 km magasságban alakul ki a D-réteg. Az ionizáció fő forrása a D-régióban az UV-sugárzás, ami a nitrogén-monoxid (NO) molekulákra hat, majd az éjszaka folyamán eltűnik. Rekombináció ebben a rétegben gyorsan lezajlik. Fontos tulajdonsága, hogy elnyeli a rövidhullámú sugárzást – napviharok során gátolja az RH kommunikációt.
Napközben, nagyjából 50-90 km magasságban alakul ki a D-réteg. Az ionizáció fő forrása a D-régióban az UV-sugárzás, ami a nitrogén-monoxid (NO) molekulákra hat, majd az éjszaka folyamán eltűnik. Rekombináció ebben a rétegben gyorsan lezajlik. Fontos tulajdonsága, hogy elnyeli a rövidhullámú sugárzást – napviharok során gátolja az RH kommunikációt.
E felett helyezkedik el az E-réteg (a tulajdonképpeni Kennelly-Heaviside réteg), amelyben a maximális elektronsűrűség 110…130 km magasságban van. Főleg lágy röntgensugarak és UV-sugárzás hozza létre, amik az oxigénmolekulákra hatnak. Az E-régió legnagyobb sűrűsége kb. 100-szorosa a D-régió legnagyobb sűrűségének, mert a rekombináció itt jóval lassabb. A D-régióhoz hasonlóan az E-réteg is gyengül az éjszaka folyamán, illetve magasabbra tolódik. Van még egy másik, átmeneti forrása is az ionizációnak az E-régió magasságában, aminek létrejöttében szerepet játszik a semleges atmoszféra mozgása, az északi fény körüli elektromos mező és a légkörbe belépő meteorok, amik felizzanak, és az őket körülvevő semleges gázt ionizálják, ezzel a nyomvonalukon egy hosszú ionizációs csíkot hoznak létre. Az ilyen csíkokat szporadikus E-rétegnek nevezik (görögül szporadikus: szórványos, helyenként előforduló). Hatása néhány perctől néhány óráig tarthat. Mivel az így létrejövő réteg jól visszaveri a nagyfrekvenciás rádióhullámokat, ezért ilyenkor a megszokottnál jóval nagyobb távolságú összeköttetés is lehetséges.
A még feljebb fekvő F-réteg (Appleton-réteg) nyáron a nappali órákban F1 és F2 rétegekre hasad. Az ionizáció maximuma az F1 rétegnél 200…230 km magasságban van, míg az F2 rétegnél 300…400 km magasságban. Az ionizáció mértéke (elektronsűrűség) rétegről-rétegre növekszik és maximális értékét az F2 rétegen kb. 400 km magasságban éri el. E felett az ionizáció mértéke gyorsan csökken, míg végül teljesen megszűnik.
Minthogy az ionoszféra folytonos állapotváltozásoknak van kitéve, a vázolt elrendezés nem tekinthető egymáson elhelyezkedő rétegek merev rendszerének: az ionizáció mértéke folytonosan változik az év- és napszak, a naptevékenység, a földrajzi szélesség és még egyéb tényezők függvényében.
Elektromágneses hullám terjedése. Az elektromágneses hullámok terjedésében jelentős szerepe van a földfelszín görbületének, a talaj eltérő konduktivitásának és legfőképpen atmoszférájának. Ha az adó- és vevőantenna a föld felszínén van, a rádióhullámok az adótól a vevőig két úton juthatnak el:
- – a troposzférán át a földfelszín mentén, mint felületi vagy talajhullámok
- – az ionoszférától visszaverődve, mint térhullámok.
 A felületi hullámok a Föld görbületét követik, és terjedésük során a felszíni abszorpciós hatások következtében veszteséget szenvednek. Ez a veszteség a frekvenciával növekszik. Igen kis frekvenciák esetében (a leghosszabb hullámtartományban) a felületi hullám nagy távolságok áthidalását teszi lehetővé. A talaj elektromos vezetőképessége és a tereptárgyak (épületek, növényzet stb.) a felületi hullámok terjedését befolyásolják, a hatótávolságot azonban főleg a kisugárzott teljesítmény határozza meg. A rövidhullámok felületi hatósugara csekély. Közepes teljesítményű amatőr adóval a 80 m-es sávban kb. 100 km-es felületi hullámú hatótávolsággal lehet számolni; azonos teljesítményű 10 m-es sávban dolgozó adónál ez a távolság kb. 15 km-re csökken. Az ultrarövid hullámok tartományában a nagyobb távolságok áthidalását felületi hullámokkal a troposzférában létrejövő hullám-elhajlás, -törés és -szóródás teszi lehetővé.
A felületi hullámok a Föld görbületét követik, és terjedésük során a felszíni abszorpciós hatások következtében veszteséget szenvednek. Ez a veszteség a frekvenciával növekszik. Igen kis frekvenciák esetében (a leghosszabb hullámtartományban) a felületi hullám nagy távolságok áthidalását teszi lehetővé. A talaj elektromos vezetőképessége és a tereptárgyak (épületek, növényzet stb.) a felületi hullámok terjedését befolyásolják, a hatótávolságot azonban főleg a kisugárzott teljesítmény határozza meg. A rövidhullámok felületi hatósugara csekély. Közepes teljesítményű amatőr adóval a 80 m-es sávban kb. 100 km-es felületi hullámú hatótávolsággal lehet számolni; azonos teljesítményű 10 m-es sávban dolgozó adónál ez a távolság kb. 15 km-re csökken. Az ultrarövid hullámok tartományában a nagyobb távolságok áthidalását felületi hullámokkal a troposzférában létrejövő hullám-elhajlás, -törés és -szóródás teszi lehetővé.
A legnagyobb földi távolságok áthidalását a rövidhullámok térbeli terjedése teszi lehetővé, amikor is a térhullámok az ionoszférától visszaverődnek. A rádióhullámok terjedési sebessége az ionoszférában valamivel nagyobb, mint a troposzférában, és lényegében az elektronkoncentráció és a frekvencia függvénye. Az elektronkoncentráció növekedésével – adott frekvencián – a terjedési sebesség is növekszik. Ha a hullámhomlok nem merőlegesen, hanem 90°-nál kisebb szöggel lép be az ionoszférába, a hullámhomlok felső része “gyorsabb”, mint az alsó része. Az eltérő terjedési sebesség következtében a terjedési irány megtörik és elegendő nagy elektronkoncentráció esetén a hullám a Föld felé visszaverődik. A jelenséggel kapcsolatosan az alábbi összefüggések érvényesek:
- Minél nagyobb az üzemi frekvencia, annál nagyobb elektronkoncentráció szükséges a reflexió feltételeinek biztosítására.
- A térhullám visszaverődése a Föld felé annál könnyebben valósul meg, minél laposabban lép be az ionoszférába.
A reflexió sohasem veszteségmentes, ezért a visszavert térhullámoknál mindig kisebb-nagyobb járulékos csillapítással kell számolni. Az ionoszféra csillapítása frekvenciafüggő: a kisebb frekvenciák csillapítása nagyobb, mint a nagyobb frekvenciáké.
A térhullámok nagy távolságú terjedését azonban az árnyékolás akadályozhatja. Fedésről beszélünk akkor, amikor a hullámok már a viszonylag alacsony E-rétegről visszaverődnek, és így a magasabban elhelyezkedő F-rétegig el sem jutnak. Összefoglalóan megállapítható, hogy a térhullámok terjedése függ a felsőhatár frekvenciától (az a frekvencia, mely merőlegesen érkezve az ionoszférába meg visszaverődik), a csillapítástól és az árnyékolástól. Az áthidalható legnagyobb távolság – egyszeres visszaverődéssel az ionoszférától 4000…4500 km. Mivel azonban a rövidhullámok a talaj és az ionoszféra között többszörösen is visszaverődhetnek, a térhullámok többszörös “ugrással” a legnagyobb lehetséges földi távolságokat is áthidalhatják.
Azonban 5 m-nél kisebb (6oMHz-nél magasabb frekvenciájú) ultrarövid hullámoknál – normális körülmények között – még a leglaposabb belépési szögnél sem tapasztalható reflexió az ionoszféráról. Ezek a nagyfrekvenciás térhullámok az ionoszférán áthatolva a világegyetemben terjednek tova.
Az ultrarövid hullámok terjedése. Az ultrarövid hullámú elektromágneses rezgések hullámhossza 10 és 1 m között van, ami 30…300 MHz-nek felel meg.Terjedésük megközelíti a fényterjedési törvényszerűségeit. Ezért szokás kvázi-optikai (fényhez hasonló) terjedésről beszélni, noha valójában ténylegesen kvázi-optikai terjedésről csak a deci-, centi- és a milliméter-tartományban van szó. Az ultrarövid hullámok kiválóan alkalmasak olyan távolságok üzembiztos áthidalására, amelyek az elméleti optikai látóhatáron belül vannak, ugyanis biztonságos hatósugaruk kb. 15 %-kal meghaladja az optikai látóhatárt. Ezen a távolságon belül térerő-ingadozás gyakorlatilag nem lép fel, és már egészen kis adóteljesítménnyel is – az időjárási viszonyoktól és az ionoszféra állapotától függetlenül – üzembiztos összeköttetések létesíthetők. A hullámterjedés-kutatás legújabb eredményei alapján az ultrarövid hullámok elhajlása a Föld felszíne felé a levegőnek a magassággal csökkenő törésmutatójával hozható összefüggésbe. A törésmutató értékét a troposzféra vízgőz tartalma (nedvessége), nyomása és hőmérséklete határozzák meg.
Az ultrarövid hullámok hatósugara közelítő számítással:
![\[d=4,13\cdot \left ( \sqrt{h1} + \sqrt{h2}\right )\]](http://rchangar.hu/wp-content/ql-cache/quicklatex.com-4b231cf745a5a87f7118ba3e1d81b3f7_l3.png "Rendered by QuickLaTeX.com")
ahol  a 2 m-es hullám hatósugara km-ben;
a 2 m-es hullám hatósugara km-ben;  az adóantenna magassága m-ben és
az adóantenna magassága m-ben és  a vevőantenna magassága m-ben.
a vevőantenna magassága m-ben.
Az összefüggés a Földnek az ún. “négyharmad” sugarán alapszik, vagyis nem a tényleges 6370 km-es földsugárral számolunk, hanem az egyharmaddal megnövelt 8500 km-es értékkel. Az ultrarövid hullámú tartományban időszakosan olyan nagy-távolságú terjedések figyelhetők meg (1000 km felett), amelyek a közönséges horizonton túli terjedéssel nem magyarázhatók. A jelenségnek többféle oka lehet, azonban többnyire a troposzféra különleges állapotára vezethető vissza.
Troposzferikus nagytávolságú terjedés.
 A troposzféra hőmérséklete általában a magassággal csökken: 1000 m-enként 6…8°C-kal. A légtömegek mozgása és egyéb meteorológiai hatások következtében a hőmérsékleti és relatív nedvesség-eloszlási görbén ugrásszerű hirtelen változások is felléphetnek, ennek következtében a görbe a normálistól eltérhet. Az ilyen hőmérsékletugrás – más néven inverzió – a légsűrűség változását okozza: a meleg levegő sűrűsége kisebb, mint a hidegé. Az optikából ismeretes a fénytörés alapszabálya: ha a fénysugár valamely optikailag sűrűbb (nagyobb törésmutatójú) közegből egy kisebb sűrűségűbe (kisebb törésmutató) lép, az átlépési pontban emelt merőlegestől elfelé, míg az optikailag sűrűbb közegbe lépve a merőleges felé törik. Az ultrarövid hullámok a terjedési közeg sűrűségének változásakor a fényhez hasonló viselkedést tanúsítanak: a hullámhomlok az inverziórétegbe belépve a Föld felszíne felé törik. Az inverziós réteg általában viszonylag kis magasságban helyezkedik el. A talajmenti inverzió közvetlenül a talaj felszíne felett alakul ki, hatására viszonylag csak kis hatósugár-növekedés jelentkezik. A magassági inverzió néhány 1000 m magasságban képződik, és ez hozza létre a nagy távolságú terjedést. Mint látható, a közvetlen terjedéssel csak azok a hullámok érik az ellenállomás antennáját (I. vevő),
A troposzféra hőmérséklete általában a magassággal csökken: 1000 m-enként 6…8°C-kal. A légtömegek mozgása és egyéb meteorológiai hatások következtében a hőmérsékleti és relatív nedvesség-eloszlási görbén ugrásszerű hirtelen változások is felléphetnek, ennek következtében a görbe a normálistól eltérhet. Az ilyen hőmérsékletugrás – más néven inverzió – a légsűrűség változását okozza: a meleg levegő sűrűsége kisebb, mint a hidegé. Az optikából ismeretes a fénytörés alapszabálya: ha a fénysugár valamely optikailag sűrűbb (nagyobb törésmutatójú) közegből egy kisebb sűrűségűbe (kisebb törésmutató) lép, az átlépési pontban emelt merőlegestől elfelé, míg az optikailag sűrűbb közegbe lépve a merőleges felé törik. Az ultrarövid hullámok a terjedési közeg sűrűségének változásakor a fényhez hasonló viselkedést tanúsítanak: a hullámhomlok az inverziórétegbe belépve a Föld felszíne felé törik. Az inverziós réteg általában viszonylag kis magasságban helyezkedik el. A talajmenti inverzió közvetlenül a talaj felszíne felett alakul ki, hatására viszonylag csak kis hatósugár-növekedés jelentkezik. A magassági inverzió néhány 1000 m magasságban képződik, és ez hozza létre a nagy távolságú terjedést. Mint látható, a közvetlen terjedéssel csak azok a hullámok érik az ellenállomás antennáját (I. vevő),
 amelyek igen lapos szögben, mintegy a Föld felszínéhez érintőlegesen lépnek ki az adóantennáról. Ha a troposzféra állapota a hullámpálya elhajlását és ezzel rendkívüli terjedést okoz, szintén a lapos lesugárzás kedvez a terjedésnek (II. vevő). Ebből nyilvánvalóan következik, hogy nagytávolságú összeköttetések létesítése szempontjából azok az antennatípusok kedvezőek, amelyek elsősorban a függőleges síkban nyalábolnak!
amelyek igen lapos szögben, mintegy a Föld felszínéhez érintőlegesen lépnek ki az adóantennáról. Ha a troposzféra állapota a hullámpálya elhajlását és ezzel rendkívüli terjedést okoz, szintén a lapos lesugárzás kedvez a terjedésnek (II. vevő). Ebből nyilvánvalóan következik, hogy nagytávolságú összeköttetések létesítése szempontjából azok az antennatípusok kedvezőek, amelyek elsősorban a függőleges síkban nyalábolnak!
Ritkán előforduló jelenség az ún.. troposzferikus hullámvezetéses átvitel (angolul: ducting). Ez csak akkor jön létre, ha egy időben egymás felett több inverziós réteg közé jut be a hullám, ott addig reflektálódik ide-oda a két réteg között, míg az alsó réteg lokális elvékonyodásához érve azon át kilép. A rendkívüli hullámvezetéses terjedést az jellemzi, hogy az összeköttetés – területileg igen távoli állomások között szűken behatárolt – lehetséges, míg a közelebbi állomások a holtzóna miatt nem érhetők el. Hullámvezetéses terjedés azonban kialakulhat a Föld felszíne és egy nagykiterjedésű talajmenti inverziós réteg között. Ennek a terjedésnek a jellemzője, hogy a terjedés útjában nincs holtzóna. Ha a troposzféra törésmutatója olyan nagy, hogy a földfelszínnel párhuzamosan kisugárzott hullámvisszaverődés lehetséges, akkor szuper-refrakcióról beszélünk. Ilyenkor az inverziós rétegen totálreflexió lép fel, amely folyamat hasonlatos a rövidhullámoknak az ionoszféra egyes rétegein lezajló reflexiós folyamatához.
Szórthullám-terjedés. A troposzféra felső tartományában, kb. 10 km
 magasságban, a légrétegek intenzív függőleges áramlása figyelhető meg. Ezek az ún. kiegyenlítődési áramlatok. A különböző hőmérsékletű légrétegek keveredése állandó turbulenciát hoz létre. Ilyenkor parazita-inhomogenitások keletkeznek, amelyeknek a környező légtömegekkel szemben eltérő hőmérsékletük, nyomásuk és relatív nedvességtartalmuk van. Ha a hullámterjedés pályája ilyen inhomogenitásokon át vezet, akkor az energia kicsiny töredéke diffúz szóródást szenved. Minthogy a szórt sugárzás a tér minden irányában terjed, egy része jóval az optikai látóhatár mögött tér vissza a Föld felszínére. Ez a maradék erőtér rendkívül kicsiny, azonban állandó értékű.
magasságban, a légrétegek intenzív függőleges áramlása figyelhető meg. Ezek az ún. kiegyenlítődési áramlatok. A különböző hőmérsékletű légrétegek keveredése állandó turbulenciát hoz létre. Ilyenkor parazita-inhomogenitások keletkeznek, amelyeknek a környező légtömegekkel szemben eltérő hőmérsékletük, nyomásuk és relatív nedvességtartalmuk van. Ha a hullámterjedés pályája ilyen inhomogenitásokon át vezet, akkor az energia kicsiny töredéke diffúz szóródást szenved. Minthogy a szórt sugárzás a tér minden irányában terjed, egy része jóval az optikai látóhatár mögött tér vissza a Föld felszínére. Ez a maradék erőtér rendkívül kicsiny, azonban állandó értékű.
A troposzferikus szórthullám-terjedést (angolul: tropospheric scatter) a 100…1000 MHz közötti frekvenciáknál szokták hasznosítani, főleg az 500 MHz körüli frekvenciáknál. Az áthidalható távolság 800…1000 km-t is elérhet. A vétel minősége rendszerint gyenge, és sokszor az átvitt jel sávszélességének csökkenése is megfigyelhető. A sávszélesség csökkenése azzal magyarázható, hogy az inhomogén tartomány különböző pontjairól származó szórthullámok fáziskéséssel érkeznek a vevőantennához. A szórási gócok helyzetváltozásai a troposzférában ezen kívül kisebb-nagyobb fadding jelenségeket is okozhatnak.
Stabilabb összeköttetés tartható fenn az ionoszferikus szórthullám-terjedéssel (angolul: ionospheric scatter), ami a kb. 100 km magasságban levő ionoszférarétegeknek köszönhető. Ehhez leginkább a 25.. .60 MHz közötti frekvenciák használhatók, míg az áthidalható távolságok 7000…2500 km.
Az ultrarövid hullámok reflexiója a sporadikus E-rétegtől. Az ionoszférában az elektronsűrűség néha váratlanul megváltozik, pl. ionoszferikus szél esetén.
 Ilyenkor az ionoszféra alsó rétegeiben igen intenzív ionizációjú inhomogenitások léphetnek fel. Minthogy ezek a sporadikus (szórt) gócok elsősorban az E-rétegben, főleg ennek alsó szakaszában keletkeznek, ezt sporadikus E-rétegnek (Es réteg) nevezzük. E jelenség okát nem sikerült ez ideig egyértelműen tisztázni, azonban hatását jól ismerjük. Bizonyított tény, hogy az ultrarövid hullámú tartománynak főleg a 30…100 MHz közötti szakasza verődik vissza az Es rétegtől. A 2 m-es sávban is sikerült olyan összeköttetések létrehozása, amelyek az adott körülmények között igen nagy valószínűséggel az Es rétegen bekövetkezett reflexióval magyarázhatók. Minthogy a hullámok a 100…130 km magasságban reflektálódnak, kiszámítható, hogy a reflektált hullámok az adótól 900…2000 km távolságban térnek vissza a földfelszínre. A szórthullámok intenzitása 1000 km-nél kisebb távolságoknál rohamosan csökken.
Ilyenkor az ionoszféra alsó rétegeiben igen intenzív ionizációjú inhomogenitások léphetnek fel. Minthogy ezek a sporadikus (szórt) gócok elsősorban az E-rétegben, főleg ennek alsó szakaszában keletkeznek, ezt sporadikus E-rétegnek (Es réteg) nevezzük. E jelenség okát nem sikerült ez ideig egyértelműen tisztázni, azonban hatását jól ismerjük. Bizonyított tény, hogy az ultrarövid hullámú tartománynak főleg a 30…100 MHz közötti szakasza verődik vissza az Es rétegtől. A 2 m-es sávban is sikerült olyan összeköttetések létrehozása, amelyek az adott körülmények között igen nagy valószínűséggel az Es rétegen bekövetkezett reflexióval magyarázhatók. Minthogy a hullámok a 100…130 km magasságban reflektálódnak, kiszámítható, hogy a reflektált hullámok az adótól 900…2000 km távolságban térnek vissza a földfelszínre. A szórthullámok intenzitása 1000 km-nél kisebb távolságoknál rohamosan csökken.
Az ultrarövid hullámok visszaverődése az északi fénytől. A Nap időnként hatalmas tömegű, elektromos töltésű izzó gázfelhőket lövell ki magából. Ezek nem tekinthetők sugárzásnak, minthogy sebességük “csupán” 1500 km/s körül van. A jelenséget kísérő anyagvándorlás miatt korpuszkuláris (részecske-) sugárzásnak nevezik. Ha a Föld ilyen részecskesugárzással találkozik, mágneses tere a részecskeáramban haladó elektronokat és ionokat a mágneses pólusok irányába eltéríti. Az eltérített részecskesugár a 70. szélességi fok körül – az ún. aurora-zónában vagy északifény-tartományban – lép be a magasabb légkörbe, és szekunder ionizációt, valamint az északi fény jelenségét idézi elő. Ugyanakkor az aurora-zóna mentén nagy intenzitású áramlás jelentkezik, amelynek erősen ingadozó mágneses tere az állandónak tekinthető földmágneses térre szuperponálódik: ún. mágneses vihar keletkezik, melynek intenzitása az északifény-tartományban a legalacsonyabb.
Az intenzív részecskesugárzás által okozott szekunder ionizáció az aurora-zónában igen nagy helyi elektronsűrűségeket hozhat létre. Ezért az északi fény környezetében kifejezett ionizált gócok keletkezhetnek, amelyeknek elektronsűrűsége az ultrarövid hullámok reflexiójához is elegendően nagy. Az ún. aurora E-rétegen végbemenő visszaverődés átlagban 100 km-es, vagy ennél nagyobb magasságban játszódik le. A diffúz reflexió következtében a jelátvitelt erős torzítás jellemzi. Ezért összeköttetések csupán távíró-üzemmódban létesíthetők.
A Napon lezajló nagyobb erupciót követően általában 26 óra múlva a részecskefelhő eléri az ionoszférát. Néha azonban az is előfordulhat, hogy a Napból kiszakadó részecskesugárzás elkerüli a Földet, és a csillagászati módszerekkel észlelt erupciót az aurora-jelenségek nem követik. Ez rendszerint akkor következik be, ha az erupció a napkorong széle felé zajlott le.
Az ultrarövid hullámok visszaverődése meteor-nyomvonalakról (meteorscatter). A Föld a Nap körüli pályáján rendkívül nagyszámú, többnyire igen kicsiny, porszerű meteorittal találkozik. A meteoritok igen nagy sebességgel (elérhetik a 72 km/s-ot is) hatolnak be az atmoszférába, miközben a súrlódási hő folytán 100 … 200 km-es magasságban elgőzölögnek, elégnek. A meteoritoknak csupán egy kis része akkora, hogy elégéskor az atmoszférában látható fénynyomot hagynak (hullócsillag), és még sokkal ritkább az olyan méretű meteorit, amely eljut a Föld felszínéig.
A meteoritok két csoportba oszthatók: az első csoportba azok sorolhatók, amelyek a világűrben mindenütt viszonylag egyenletes eloszlásban találhatók. Ezek kitüntetett irány nélkül és különböző sebességgel mozognak. A második csoporthoz tartozó meteoritok pedig meghatározott pályákon, azonos irányokban és sebességekkel haladnak. Ezek a meteoráramok vagy meteorit-záporok periodikusan keresztezik a Föld pályáját, és végleges megsemmisülés előtt pályájuk mentén az atmoszférában ionizált csatornát létesítenek. Az ilyen ionizált csatorna rövid életű, mivel az igen kis nyomású magas atmoszférában hamar szétterjed és eloszlik. A kezdeti szakaszban azonban olyan nagy elektronsűrűség léphet fel, hogy az ultrarövid hullámok az ionizált csatornától visszaverődnek. Minél nagyobb méretű a rohanó meteorit, annál nagyobb és hosszabb élettartamú az általa létrehozott ionizált csatorna. Összeköttetéseket a meteor-nyomvonalaktól visszavert hullámokkal a kanadai Janet-eljárás szerint gyakorlatilag is létesítenek. Ezen kívül a 2 m-es sávban dolgozó amatőrök is kiterjedten használják. Általában nem az első csoporthoz tartozó, szórványosan fellépő meteoritok, hanem a periodikusan jelentkező meteoritrajok nyomvonalait hasznosítják rádióösszeköttetésekhez. Minthogy az utóbbiak pályája és sebessége többnyire ismeretes, a Föld és a meteoritraj találkozásának időpontja kielégítő pontossággal előre számítható.
Az ultrarövid hullámok reflexiója a Hold és a mesterséges holdak felszínéről. Az ultrarövid hullámú átviteltechnika a Föld-Hold-Föld (EME) útvonalon át azon a felismerésen alapszik, hogy az ultrarövid hullámok az ionoszféra rétegeken áthatolva a világűrbe jutnak ki. Már 1946-ban sikerült venni holdfelszínről visszaverődött impulzusokat. (megjegyzés: Eredetileg 1944 márciusában Bay Zoltán, az akkori Műegyetem Atomfizikai Intézetének igazgatója vetette fel a gondolatot, hogy a Holdat visszaverő felületként alkalmazva rádióhullámok, visszaverődését lehetne észlelni. A háborús események miatt a már megépített berendezés megsemmisült. A munkát 1945.év második felében ismét megkezdték. A kísérlet 1946 február első napjaiban eredménnyel végződött. A kiséletet az Egyesült Izzó kutató-laboratóriumában végezték el. A vonatkozó leírás és fényképek a Rádióévkönyv 1947-es kötetében [Hungária kiadás] találhatók).
Az első holdreflexiós kétirányú amatőr összeköttetést 1960. július 21-én létesítette a W6HB (San Carlos, Kalifornia) és W1BU (Medfield, Massachussetts) állomás az 1296 MHz-es sávban. Mindkét állomás kimeneti teljesítménye 400W volt és parabolaantennákat használtak. A két állomás légvonalban 4320 km-re volt egymástól, azonban a ténylegesen áthidalt távolság 768 000 km-t tett ki. Az első sikeres kísérletet 1964-ben továbbiak követték a 2 m-es és 70 cm-es amatőrsávban. Ezek során a holdreflexió segítségével Európa és Amerika között is létesült kétirányú összeköttetés.
A Föld-Hold-Föld útvonal használata rendkívüli technikai felkészültséget tesz szükségessé. Az egységes üzemszerű összeköttetésekhez a közel 5 másodperces jelátfutási idő is túl sok lehet, ez azonban amatőr vonatkozásban nem jelent hátrányt. Különleges perspektívát jelentenek az ultrarövid hullámú átviteltechnikában a műholdak, amelyeket előre számított Föld körüli pályára juttatnak. A tudományos célokat szolgáló különféle mesterséges holdak mellett az Egyesült Államokban amatőr célú mesterséges holdat is fellőttek (OSCAR). Az interkontinentális tv-átvitel céljaira szolgálnak a MOLNYIJA, TELSTAR, SYNCOM stb. mesterséges híradástechnikai holdak. A passzív híradástechnikai mesterséges holdak lényegében nagyméretű ballonok, amelyeknek felszíne vékony fémréteggel van borítva. (Pl. az ECHO ballon.) Ennek következtében a rádió- és fényhullámokat igen jó hatásfokkal képesek reflektálni. Az aktív híradástechnikai holdak ezzel szemben komplett vevő- és adóberendezésekkel vannak felszerelve: a Földről érkező jeleket egy másik frekvencián ismét lesugározzák, relézik. Az aktív mesterséges holdak elektronikus adattárolót is vihetnek magukkal, amelynek segítségével a vett és tárolt jeleket később, pl. a földi parancsra ismét lesugározzák.

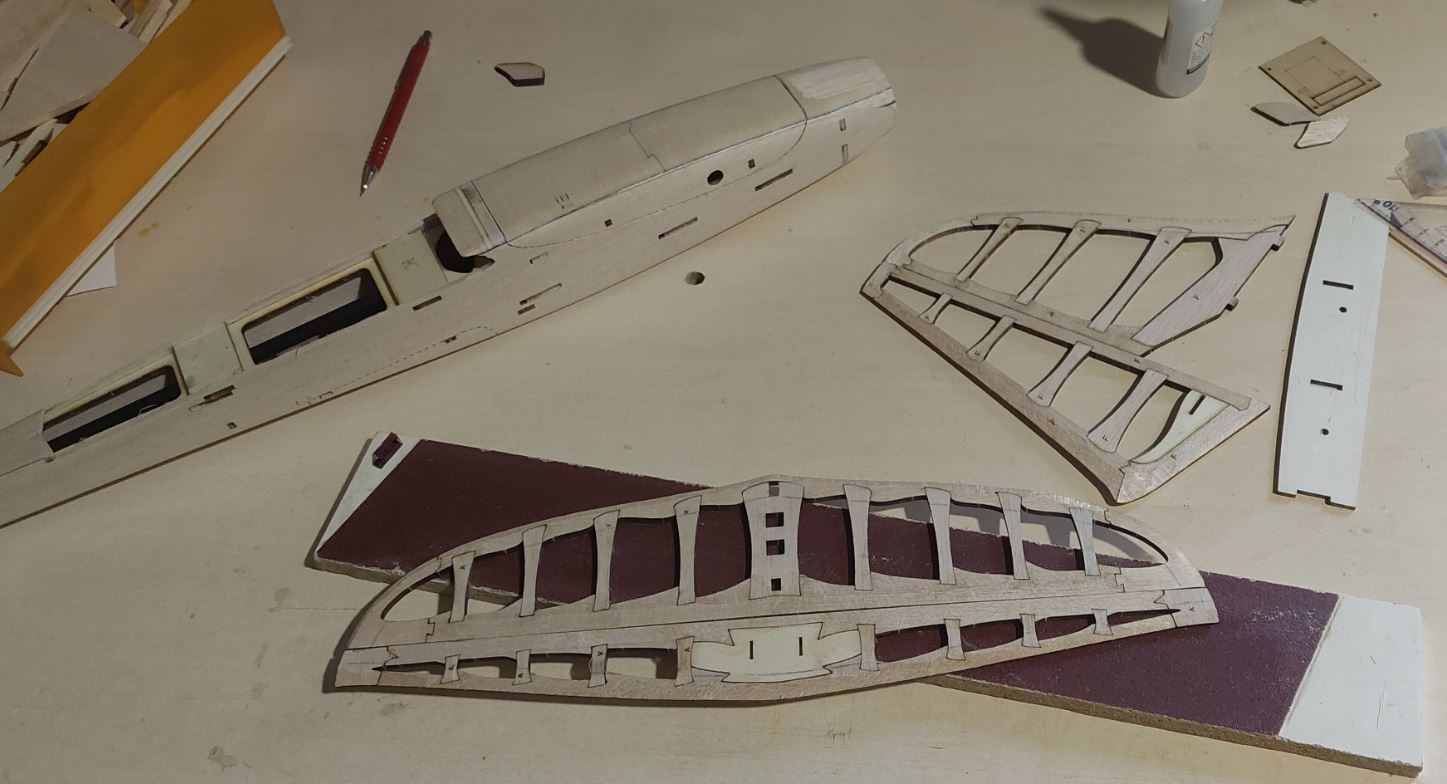
 Az alkatrészeket egy fadobozban kapjuk, ami nemcsak védi, de az előre perforált lemezekből később egy tartót tudunk összerakni, hogy a gépet esetleg ne a párás fűbe kelljen lerakni és a súlypont beállítását is segíti. A teljes kit tartalmazza fa alkatrészeket, szén farokcsövet, tolórudakat és szerelékeket, valamint egy szilikonos felületű nyomtatott építősablont. Ezen nagyon egyszerű a ragasztás.
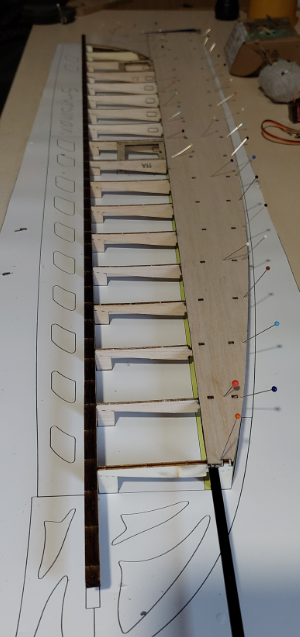
Az alkatrészeket egy fadobozban kapjuk, ami nemcsak védi, de az előre perforált lemezekből később egy tartót tudunk összerakni, hogy a gépet esetleg ne a párás fűbe kelljen lerakni és a súlypont beállítását is segíti. A teljes kit tartalmazza fa alkatrészeket, szén farokcsövet, tolórudakat és szerelékeket, valamint egy szilikonos felületű nyomtatott építősablont. Ezen nagyon egyszerű a ragasztás.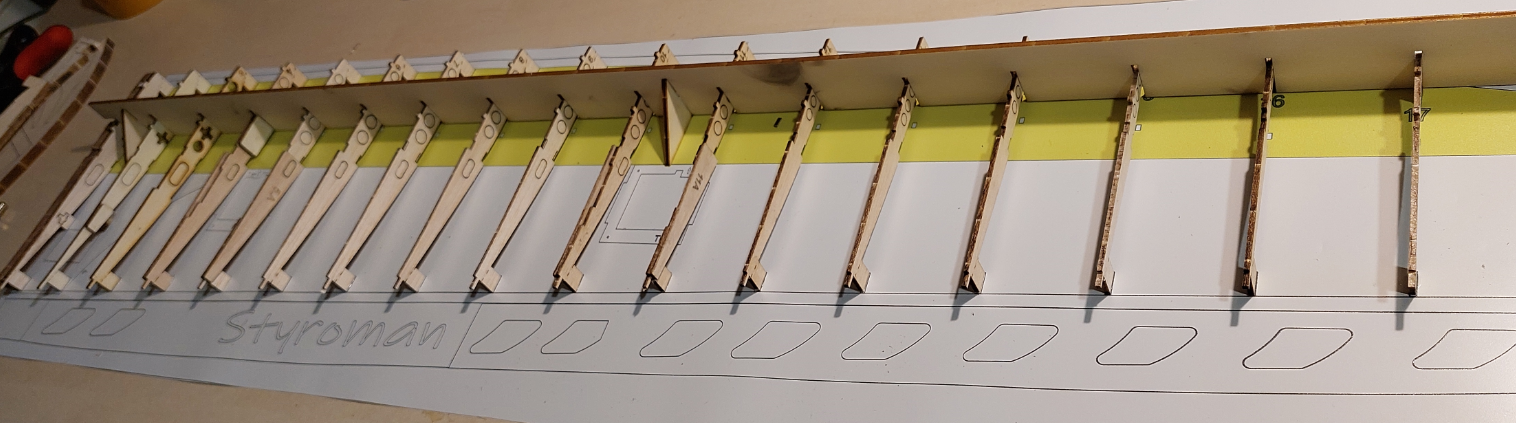 Az építést a szárnyal kezdtem. Az S4083 egy enyhén ívelt profil, ezért a pontosabb építés miatt a bordákat fejjel lefelé rögzítjük az építősablonra. A kis lábaikat egyszerűen a megfelelő téglalapokra ragasztjuk egy csepp pillanatragasztóval és egészen addig így dolgozunk, amíg a szárny alsó torziója felkerül. A bordák függőleges rögzítését egy rétegelt sablon is segíti.
Az építést a szárnyal kezdtem. Az S4083 egy enyhén ívelt profil, ezért a pontosabb építés miatt a bordákat fejjel lefelé rögzítjük az építősablonra. A kis lábaikat egyszerűen a megfelelő téglalapokra ragasztjuk egy csepp pillanatragasztóval és egészen addig így dolgozunk, amíg a szárny alsó torziója felkerül. A bordák függőleges rögzítését egy rétegelt sablon is segíti.



 Follow
Follow